

G2D图像处理硬件调用和测试-基于米尔全志T113-i开发板

2024-04-09

1742

来源:米尔电子
本篇测评由电子工程世界的优秀测评者“jf_99374259”提供。
本文将介绍基于米尔电子MYD-YT113i开发板的G2D图像处理硬件调用和测试。
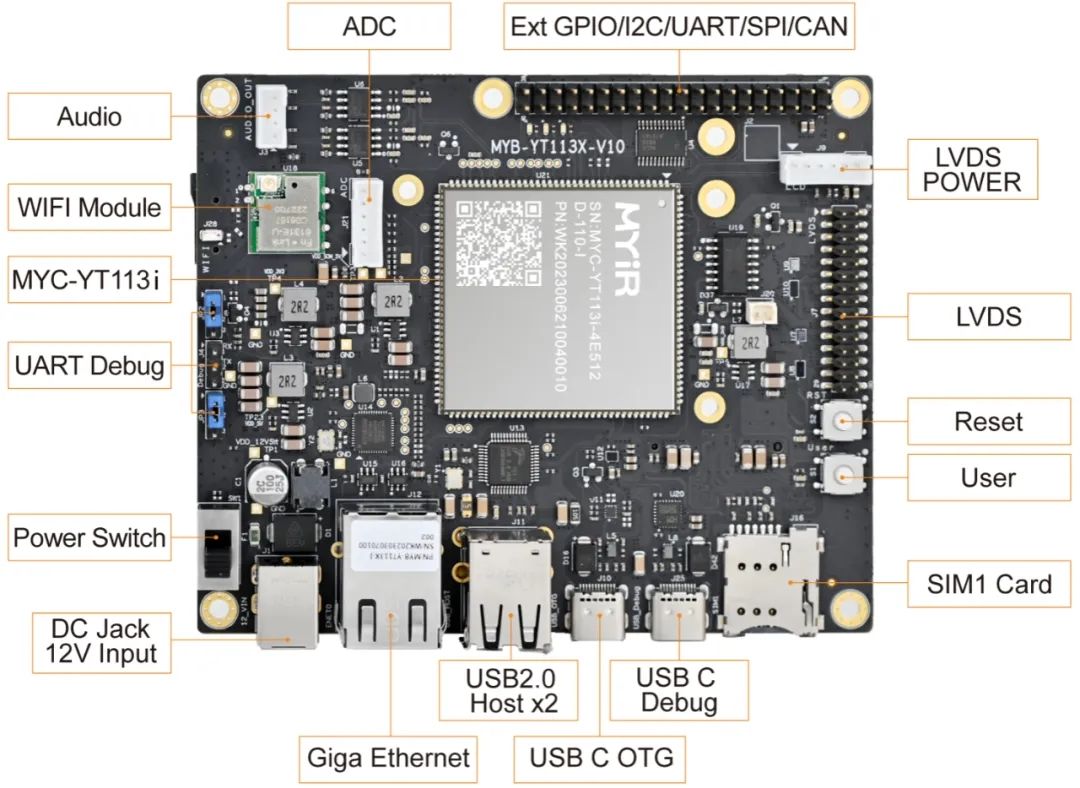
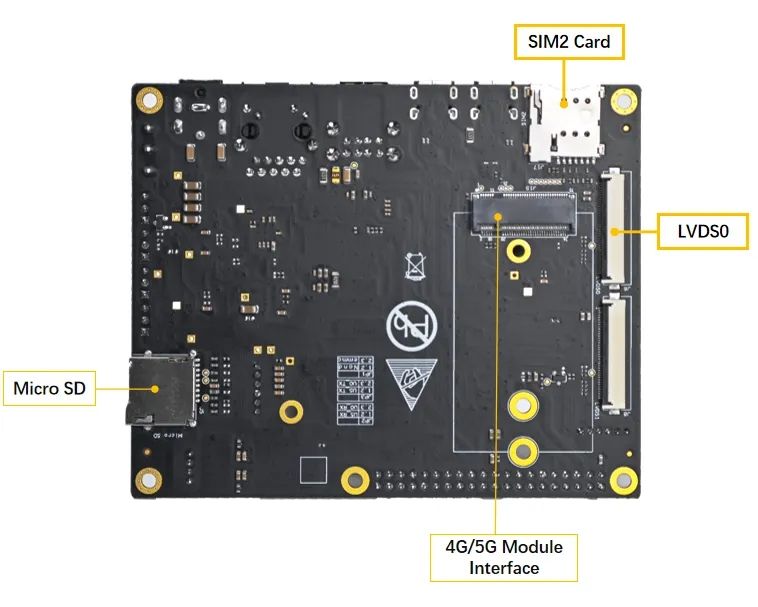
MYC-YT113i核心板及开发板
真正的国产核心板,100%国产物料认证
国产T113-i处理器配备2*Cortex-A7@1.2GHz ,RISC-V
外置DDR3接口、支持视频编解码器、HiFi4 DSP
接口丰富:视频采集接口、显示器接口、USB2.0 接口、CAN 接口、千兆以太网接口
工业级:-40℃~+85℃、尺寸37mm*39mm
邮票孔+LGA,140+50PIN

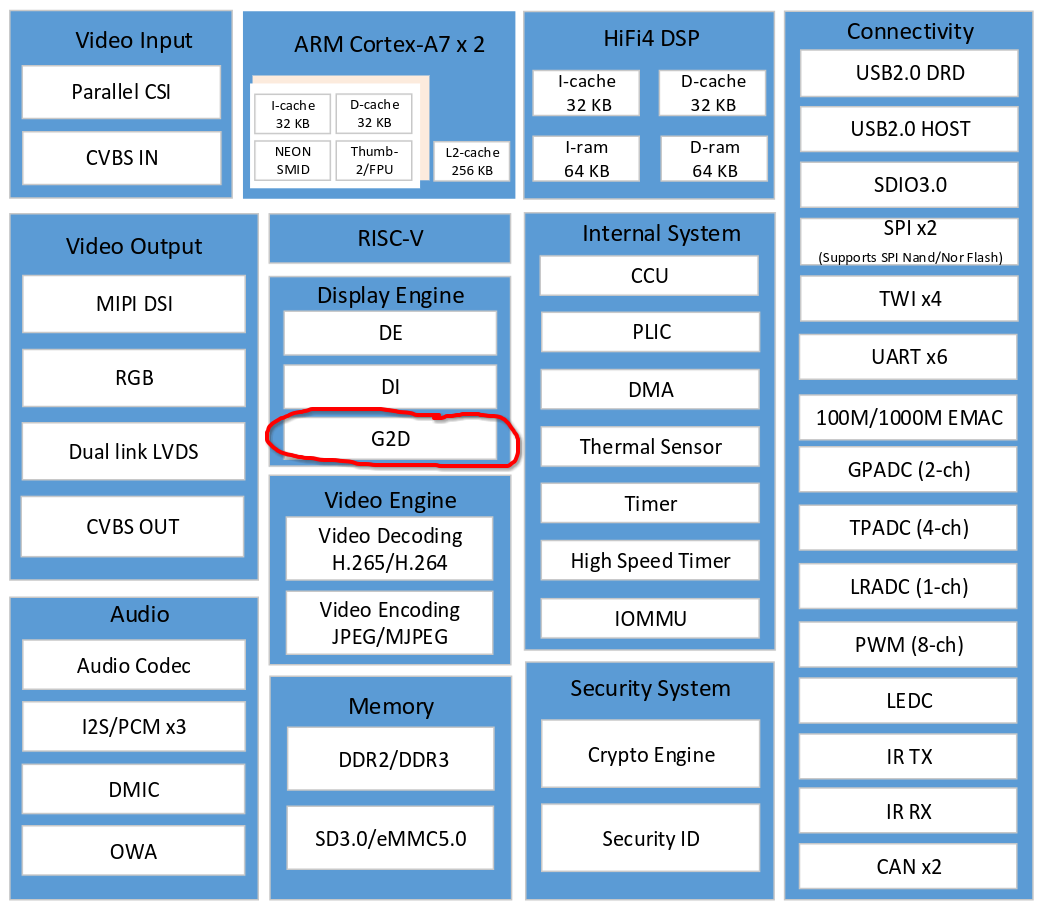
全志 T113-i 2D图形加速硬件支持情况
Supports layer size up to 2048 x 2048 pixels
Supports pre-multiply alpha image data
Supports color key
Supports two pipes Porter-Duff alpha blending
Supports multiple video formats 4:2:0, 4:2:2, 4:1:1 and multiple pixel formats (8/16/24/32 bits graphics
layer)Supports memory scan order option
Supports any format convert function
Supports 1/16× to 32× resize ratio
Supports 32-phase 8-tap horizontal anti-alias filter and 32-phase 4-tap vertical anti-alias filter
Supports window clip
Supports FillRectangle, BitBlit, StretchBlit and MaskBlit
Supports horizontal and vertical flip, clockwise 0/90/180/270 degree rotate for normal buffer
Supports horizontal flip, clockwise 0/90/270 degree rotate for LBC buffer
可以看到 g2d 硬件支持相当多的2D图像处理,包括颜色空间转换,分辨率缩放,图层叠加,旋转等
开发环境配置
基于C语言实现的YUV转RGB
这里复用之前T113-i JPG解码的函数
void yuv420sp2rgb(const unsigned char* yuv420sp, int w, int h, unsigned char* rgb)
{
const unsigned char* yptr = yuv420sp;
const unsigned char* vuptr = yuv420sp + w * h;
for (int y = 0; y < h; y += 2)
{
const unsigned char* yptr0 = yptr;
const unsigned char* yptr1 = yptr + w;
unsigned char* rgb0 = rgb;
unsigned char* rgb1 = rgb + w * 3;
int remain = w;
#define SATURATE_CAST_UCHAR(X) (unsigned char)::std::min(::std::max((int)(X), 0), 255);
for (; remain > 0; remain -= 2)
{
// R = 1.164 * yy + 1.596 * vv
// G = 1.164 * yy - 0.813 * vv - 0.391 * uu
// B = 1.164 * yy + 2.018 * uu
// R = Y + (1.370705 * (V-128))
// G = Y - (0.698001 * (V-128)) - (0.337633 * (U-128))
// B = Y + (1.732446 * (U-128))
// R = ((Y << 6) + 87.72512 * (V-128)) >> 6
// G = ((Y << 6) - 44.672064 * (V-128) - 21.608512 * (U-128)) >> 6
// B = ((Y << 6) + 110.876544 * (U-128)) >> 6
// R = ((Y << 6) + 90 * (V-128)) >> 6
// G = ((Y << 6) - 46 * (V-128) - 22 * (U-128)) >> 6
// B = ((Y << 6) + 113 * (U-128)) >> 6
// R = (yy + 90 * vv) >> 6
// G = (yy - 46 * vv - 22 * uu) >> 6
// B = (yy + 113 * uu) >> 6
int v = vuptr[0] - 128;
int u = vuptr[1] - 128;
int ruv = 90 * v;
int guv = -46 * v + -22 * u;
int buv = 113 * u;
int y00 = yptr0[0] << 6;
rgb0[0] = SATURATE_CAST_UCHAR((y00 + ruv) >> 6);
rgb0[1] = SATURATE_CAST_UCHAR((y00 + guv) >> 6);
rgb0[2] = SATURATE_CAST_UCHAR((y00 + buv) >> 6);
int y01 = yptr0[1] << 6;
rgb0[3] = SATURATE_CAST_UCHAR((y01 + ruv) >> 6);
rgb0[4] = SATURATE_CAST_UCHAR((y01 + guv) >> 6);
rgb0[5] = SATURATE_CAST_UCHAR((y01 + buv) >> 6);
int y10 = yptr1[0] << 6;
rgb1[0] = SATURATE_CAST_UCHAR((y10 + ruv) >> 6);
rgb1[1] = SATURATE_CAST_UCHAR((y10 + guv) >> 6);
rgb1[2] = SATURATE_CAST_UCHAR((y10 + buv) >> 6);
int y11 = yptr1[1] << 6;
rgb1[3] = SATURATE_CAST_UCHAR((y11 + ruv) >> 6);
rgb1[4] = SATURATE_CAST_UCHAR((y11 + guv) >> 6);
rgb1[5] = SATURATE_CAST_UCHAR((y11 + buv) >> 6);
yptr0 += 2;
yptr1 += 2;
vuptr += 2;
rgb0 += 6;
rgb1 += 6;
}
#undef SATURATE_CAST_UCHAR
yptr += 2 * w;
rgb += 2 * 3 * w;
}
}
基于ARM neon指令集优化的YUV转RGB
考虑到armv7编译器的自动neon优化能力较差,这里针对性的编写 arm neon inline assembly 实现YUV2RGB内核部分,达到最优化的性能,榨干cpu性能
void yuv420sp2rgb_neon(const unsigned char* yuv420sp, int w, int h, unsigned char* rgb)
{
const unsigned char* yptr = yuv420sp;
const unsigned char* vuptr = yuv420sp + w * h;
#if __ARM_NEON
uint8x8_t _v128 = vdup_n_u8(128);
int8x8_t _v90 = vdup_n_s8(90);
int8x8_t _v46 = vdup_n_s8(46);
int8x8_t _v22 = vdup_n_s8(22);
int8x8_t _v113 = vdup_n_s8(113);
#endif // __ARM_NEON
for (int y = 0; y < h; y += 2)
{
const unsigned char* yptr0 = yptr;
const unsigned char* yptr1 = yptr + w;
unsigned char* rgb0 = rgb;
unsigned char* rgb1 = rgb + w * 3;
#if __ARM_NEON
int nn = w >> 3;
int remain = w - (nn << 3);
#else
int remain = w;
#endif // __ARM_NEON
#if __ARM_NEON
#if __aarch64__
for (; nn > 0; nn--)
{
int16x8_t _yy0 = vreinterpretq_s16_u16(vshll_n_u8(vld1_u8(yptr0), 6));
int16x8_t _yy1 = vreinterpretq_s16_u16(vshll_n_u8(vld1_u8(yptr1), 6));
int8x8_t _vvuu = vreinterpret_s8_u8(vsub_u8(vld1_u8(vuptr), _v128));
int8x8x2_t _vvvvuuuu = vtrn_s8(_vvuu, _vvuu);
int8x8_t _vv = _vvvvuuuu.val[0];
int8x8_t _uu = _vvvvuuuu.val[1];
int16x8_t _r0 = vmlal_s8(_yy0, _vv, _v90);
int16x8_t _g0 = vmlsl_s8(_yy0, _vv, _v46);
_g0 = vmlsl_s8(_g0, _uu, _v22);
int16x8_t _b0 = vmlal_s8(_yy0, _uu, _v113);
int16x8_t _r1 = vmlal_s8(_yy1, _vv, _v90);
int16x8_t _g1 = vmlsl_s8(_yy1, _vv, _v46);
_g1 = vmlsl_s8(_g1, _uu, _v22);
int16x8_t _b1 = vmlal_s8(_yy1, _uu, _v113);
uint8x8x3_t _rgb0;
_rgb0.val[0] = vqshrun_n_s16(_r0, 6);
_rgb0.val[1] = vqshrun_n_s16(_g0, 6);
_rgb0.val[2] = vqshrun_n_s16(_b0, 6);
uint8x8x3_t _rgb1;
_rgb1.val[0] = vqshrun_n_s16(_r1, 6);
_rgb1.val[1] = vqshrun_n_s16(_g1, 6);
_rgb1.val[2] = vqshrun_n_s16(_b1, 6);
vst3_u8(rgb0, _rgb0);
vst3_u8(rgb1, _rgb1);
yptr0 += 8;
yptr1 += 8;
vuptr += 8;
rgb0 += 24;
rgb1 += 24;
}
#else
if (nn > 0)
{
asm volatile(
"0: n"
"pld [%3, #128] n"
"vld1.u8 {d2}, [%3]! n"
"vsub.s8 d2, d2, %12 n"
"pld [%1, #128] n"
"vld1.u8 {d0}, [%1]! n"
"pld [%2, #128] n"
"vld1.u8 {d1}, [%2]! n"
"vshll.u8 q2, d0, #6 n"
"vorr d3, d2, d2 n"
"vshll.u8 q3, d1, #6 n"
"vorr q9, q2, q2 n"
"vtrn.s8 d2, d3 n"
"vorr q11, q3, q3 n"
"vmlsl.s8 q9, d2, %14 n"
"vorr q8, q2, q2 n"
"vmlsl.s8 q11, d2, %14 n"
"vorr q10, q3, q3 n"
"vmlal.s8 q8, d2, %13 n"
"vmlal.s8 q2, d3, %16 n"
"vmlal.s8 q10, d2, %13 n"
"vmlsl.s8 q9, d3, %15 n"
"vmlal.s8 q3, d3, %16 n"
"vmlsl.s8 q11, d3, %15 n"
"vqshrun.s16 d24, q8, #6 n"
"vqshrun.s16 d26, q2, #6 n"
"vqshrun.s16 d4, q10, #6 n"
"vqshrun.s16 d25, q9, #6 n"
"vqshrun.s16 d6, q3, #6 n"
"vqshrun.s16 d5, q11, #6 n"
"subs %0, #1 n"
"vst3.u8 {d24-d26}, [%4]! n"
"vst3.u8 {d4-d6}, [%5]! n"
"bne 0b n"
: "=r"(nn), // %0
"=r"(yptr0), // %1
"=r"(yptr1), // %2
"=r"(vuptr), // %3
"=r"(rgb0), // %4
"=r"(rgb1) // %5
: "0"(nn),
"1"(yptr0),
"2"(yptr1),
"3"(vuptr),
"4"(rgb0),
"5"(rgb1),
"w"(_v128), // %12
"w"(_v90), // %13
"w"(_v46), // %14
"w"(_v22), // %15
"w"(_v113) // %16
: "cc", "memory", "q0", "q1", "q2", "q3", "q8", "q9", "q10", "q11", "q12", "d26");
}
#endif // __aarch64__
#endif // __ARM_NEON
#define SATURATE_CAST_UCHAR(X) (unsigned char)::std::min(::std::max((int)(X), 0), 255);
for (; remain > 0; remain -= 2)
{
// R = 1.164 * yy + 1.596 * vv
// G = 1.164 * yy - 0.813 * vv - 0.391 * uu
// B = 1.164 * yy + 2.018 * uu
// R = Y + (1.370705 * (V-128))
// G = Y - (0.698001 * (V-128)) - (0.337633 * (U-128))
// B = Y + (1.732446 * (U-128))
// R = ((Y << 6) + 87.72512 * (V-128)) >> 6
// G = ((Y << 6) - 44.672064 * (V-128) - 21.608512 * (U-128)) >> 6
// B = ((Y << 6) + 110.876544 * (U-128)) >> 6
// R = ((Y << 6) + 90 * (V-128)) >> 6
// G = ((Y << 6) - 46 * (V-128) - 22 * (U-128)) >> 6
// B = ((Y << 6) + 113 * (U-128)) >> 6
// R = (yy + 90 * vv) >> 6
// G = (yy - 46 * vv - 22 * uu) >> 6
// B = (yy + 113 * uu) >> 6
int v = vuptr[0] - 128;
int u = vuptr[1] - 128;
int ruv = 90 * v;
int guv = -46 * v + -22 * u;
int buv = 113 * u;
int y00 = yptr0[0] << 6;
rgb0[0] = SATURATE_CAST_UCHAR((y00 + ruv) >> 6);
rgb0[1] = SATURATE_CAST_UCHAR((y00 + guv) >> 6);
rgb0[2] = SATURATE_CAST_UCHAR((y00 + buv) >> 6);
int y01 = yptr0[1] << 6;
rgb0[3] = SATURATE_CAST_UCHAR((y01 + ruv) >> 6);
rgb0[4] = SATURATE_CAST_UCHAR((y01 + guv) >> 6);
rgb0[5] = SATURATE_CAST_UCHAR((y01 + buv) >> 6);
int y10 = yptr1[0] << 6;
rgb1[0] = SATURATE_CAST_UCHAR((y10 + ruv) >> 6);
rgb1[1] = SATURATE_CAST_UCHAR((y10 + guv) >> 6);
rgb1[2] = SATURATE_CAST_UCHAR((y10 + buv) >> 6);
int y11 = yptr1[1] << 6;
rgb1[3] = SATURATE_CAST_UCHAR((y11 + ruv) >> 6);
rgb1[4] = SATURATE_CAST_UCHAR((y11 + guv) >> 6);
rgb1[5] = SATURATE_CAST_UCHAR((y11 + buv) >> 6);
yptr0 += 2;
yptr1 += 2;
vuptr += 2;
rgb0 += 6;
rgb1 += 6;
}
#undef SATURATE_CAST_UCHAR
yptr += 2 * w;
rgb += 2 * 3 * w;
}
}
基于G2D图形硬件的YUV转RGB
我们先实现 dmaion buffer 管理器,参考
这里贴的代码省略了异常错误处理的逻辑,有个坑是 linux-4.9 和 linux-5.4 用法不一样,米尔电子的这个T113-i系统是linux-5.4,所以不兼容4.9内核的ioctl用法习惯
struct ion_memory
{
size_t size;
int fd;
void* virt_addr;
unsigned int phy_addr;
};
class ion_allocator
{
public:
ion_allocator();
~ion_allocator();
int open();
void close();
int alloc(size_t size, struct ion_memory* mem);
int free(struct ion_memory* mem);
int flush(struct ion_memory* mem);
public:
int ion_fd;
int cedar_fd;
};
ion_allocator::ion_allocator()
{
ion_fd = -1;
cedar_fd = -1;
}
ion_allocator::~ion_allocator()
{
close();
}
int ion_allocator::open()
{
close();
ion_fd = ::open("/dev/ion", O_RDWR);
cedar_fd = ::open("/dev/cedar_dev", O_RDONLY);
ioctl(cedar_fd, IOCTL_ENGINE_REQ, 0);
return 0;
}
void ion_allocator::close()
{
if (cedar_fd != -1)
{
ioctl(cedar_fd, IOCTL_ENGINE_REL, 0);
::close(cedar_fd);
cedar_fd = -1;
}
if (ion_fd != -1)
{
::close(ion_fd);
ion_fd = -1;
}
}
int ion_allocator::alloc(size_t size, struct ion_memory* mem)
{
struct aw_ion_new_alloc_data alloc_data;
alloc_data.len = size;
alloc_data.heap_id_mask = AW_ION_SYSTEM_HEAP_MASK;
alloc_data.flags = AW_ION_CACHED_FLAG | AW_ION_CACHED_NEEDS_SYNC_FLAG;
alloc_data.fd = 0;
alloc_data.unused = 0;
ioctl(ion_fd, AW_ION_IOC_NEW_ALLOC, &alloc_data);
void* virt_addr = mmap(NULL, size, PROT_READ|PROT_WRITE, MAP_SHARED, alloc_data.fd, 0);
struct aw_user_iommu_param iommu_param;
iommu_param.fd = alloc_data.fd;
iommu_param.iommu_addr = 0;
ioctl(cedar_fd, IOCTL_GET_IOMMU_ADDR, &iommu_param);
mem->size = size;
mem->fd = alloc_data.fd;
mem->virt_addr = virt_addr;
mem->phy_addr = iommu_param.iommu_addr;
return 0;
}
int ion_allocator::free(struct ion_memory* mem)
{
if (mem->fd == -1)
return 0;
struct aw_user_iommu_param iommu_param;
iommu_param.fd = mem->fd;
ioctl(cedar_fd, IOCTL_FREE_IOMMU_ADDR, &iommu_param);
munmap(mem->virt_addr, mem->size);
::close(mem->fd);
mem->size = 0;
mem->fd = -1;
mem->virt_addr = 0;
mem->phy_addr = 0;
return 0;
}
int ion_allocator::flush(struct ion_memory* mem)
{
struct dma_buf_sync sync;
sync.flags = DMA_BUF_SYNC_END | DMA_BUF_SYNC_RW;
ioctl(mem->fd, DMA_BUF_IOCTL_SYNC, &sync);
return 0;
}
然后再实现 G2D图形硬件 YUV转RGB 的转换器
提前分配好YUV和RGB的dmaion buffer
将YUV数据拷贝到dmaion buffer,flush cache完成同步
配置转换参数,ioctl调用G2D_CMD_BITBLT_H完成转换
flush cache完成同步,从dmaion buffer拷贝出RGB数据
释放dmaion buffer
// 步骤1
ion_allocator ion;
ion.open();
struct ion_memory yuv_ion;
ion.alloc(rgb_size, &rgb_ion);
struct ion_memory rgb_ion;
ion.alloc(yuv_size, &yuv_ion);
int g2d_fd = ::open("/dev/g2d", O_RDWR);
// 步骤2
memcpy((unsigned char*)yuv_ion.virt_addr, yuv420sp, yuv_size);
ion.flush(&yuv_ion);
// 步骤3
g2d_blt_h blit;
memset(&blit, 0, sizeof(blit));
blit.flag_h = G2D_BLT_NONE_H;
blit.src_image_h.format = G2D_FORMAT_YUV420UVC_V1U1V0U0;
blit.src_image_h.width = width;
blit.src_image_h.height = height;
blit.src_image_h.align[0] = 0;
blit.src_image_h.align[1] = 0;
blit.src_image_h.clip_rect.x = 0;
blit.src_image_h.clip_rect.y = 0;
blit.src_image_h.clip_rect.w = width;
blit.src_image_h.clip_rect.h = height;
blit.src_image_h.gamut = G2D_BT601;
blit.src_image_h.bpremul = 0;
blit.src_image_h.mode = G2D_PIXEL_ALPHA;
blit.src_image_h.use_phy_addr = 0;
blit.src_image_h.fd = yuv_ion.fd;
blit.dst_image_h.format = G2D_FORMAT_RGB888;
blit.dst_image_h.width = width;
blit.dst_image_h.height = height;
blit.dst_image_h.align[0] = 0;
blit.dst_image_h.clip_rect.x = 0;
blit.dst_image_h.clip_rect.y = 0;
blit.dst_image_h.clip_rect.w = width;
blit.dst_image_h.clip_rect.h = height;
blit.dst_image_h.gamut = G2D_BT601;
blit.dst_image_h.bpremul = 0;
blit.dst_image_h.mode = G2D_PIXEL_ALPHA;
blit.dst_image_h.use_phy_addr = 0;
blit.dst_image_h.fd = rgb_ion.fd;
ioctl(g2d_fd, G2D_CMD_BITBLT_H, &blit);
// 步骤4
ion.flush(&rgb_ion);
memcpy(rgb, (const unsigned char*)rgb_ion.virt_addr, rgb_size);
// 步骤5
ion.free(&rgb_ion);
ion.free(&yuv_ion);
ion.close();
::close(g2d_fd);
G2D图像硬件YUV转RGB测试
考虑到dmaion buffer分配和释放都比较耗时,我们提前做好,循环调用步骤3的G2D转换,统计耗时,并在top工具中查看CPU占用率
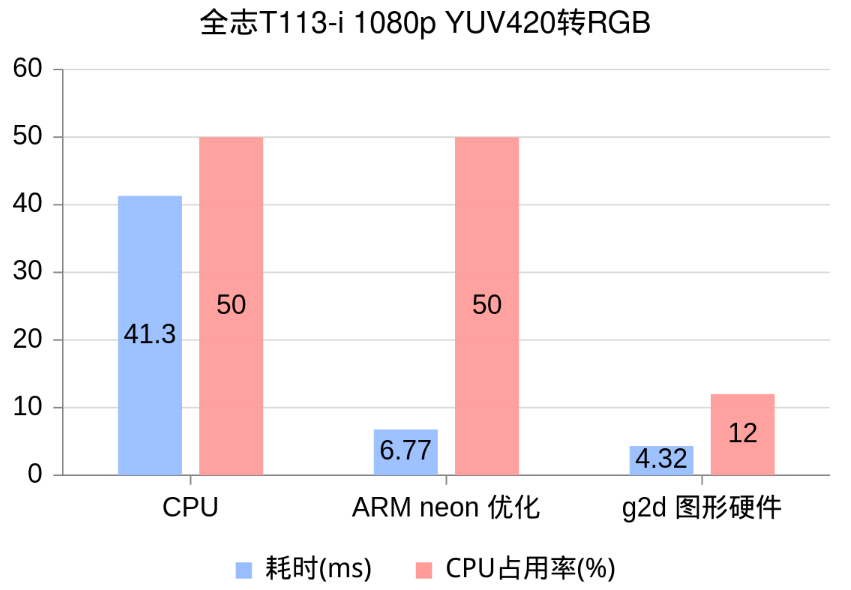
sh-4.4# LD_LIBRARY_PATH=. ./g2dtest INFO : cedarc <CedarPluginVDInit:84>: register mjpeg decoder success! this device is not whitelisted for jpeg decoder cvi this device is not whitelisted for jpeg decoder cvi this device is not whitelisted for jpeg decoder cvi this device is not whitelisted for jpeg encoder rkmpp INFO : cedarc <log_set_level:43>: Set log level to 5 from /vendor/etc/cedarc.conf ERROR : cedarc <DebugCheckConfig:316>: now cedarc log level:5 ERROR : cedarc <VideoEncCreate:241>: now cedarc log level:5 yuv420sp2rgb 46.61 yuv420sp2rgb 42.04 yuv420sp2rgb 41.32 yuv420sp2rgb 42.06 yuv420sp2rgb 41.69 yuv420sp2rgb 42.05 yuv420sp2rgb 41.29 yuv420sp2rgb 41.30 yuv420sp2rgb 42.14 yuv420sp2rgb 41.33 yuv420sp2rgb_neon 10.57 yuv420sp2rgb_neon 7.21 yuv420sp2rgb_neon 6.77 yuv420sp2rgb_neon 8.31 yuv420sp2rgb_neon 7.60 yuv420sp2rgb_neon 6.80 yuv420sp2rgb_neon 6.77 yuv420sp2rgb_neon 7.01 yuv420sp2rgb_neon 7.11 yuv420sp2rgb_neon 7.06 yuv420sp2rgb_g2d 4.32 yuv420sp2rgb_g2d 4.69 yuv420sp2rgb_g2d 4.56 yuv420sp2rgb_g2d 4.57 yuv420sp2rgb_g2d 4.52 yuv420sp2rgb_g2d 4.54 yuv420sp2rgb_g2d 4.52 yuv420sp2rgb_g2d 4.58 yuv420sp2rgb_g2d 4.60 yuv420sp2rgb_g2d 4.67
可以看到 ARM neon 的优化效果非常明显,而使用G2D图形硬件能获得进一步加速,并且能显著降低CPU占用率!
| 耗时(ms) | CPU占用率(%) | |
|---|---|---|
| C | 41.30 | 50 |
| neon | 6.77 | 50 |
| g2d | 4.32 | 12 |
转换结果对比和分析
C和neon的转换结果完全一致,但是g2d转换后的图片有明显的色差


G2D图形硬件只支持 G2D_BT601,G2D_BT709,G2D_BT2020 3种YUV系数,而JPG所使用的YUV系数是改版BT601,因此产生了色差
从g2d内核驱动中也可以得知,暂时没有方法为g2d设置自定义的YUV系数,g2d不适合用于JPG的编解码,但依然适合摄像头和视频编解码的颜色空间转换

2025-09-04
6TOPS算力驱动30亿参数LLM,米尔RK3576部署端侧多模态多轮对话
关键词:瑞芯微 RK3576、NPU(神经网络处理器)、端侧小语言模型(SLM)、多模态 LLM、边缘 AI 部署、开发板当 GPT-4o 用毫秒级响应处理图文混合指令、Gemini-1.5-Pro 以百万 token 上下文 “消化” 长文档时,行业的目光正从云端算力竞赛转向一个更实际的命题:如何让智能 “落地”?—— 摆脱网络依赖、保护本地隐私、控制硬件成本,让设备真正具备 “看见并对话” 的
2025-09-04
直播预告 | 恩智浦技术日巡回研讨会:技术盛宴,“云端”开席!
9月9日,恩智浦技术日巡回研讨会将在杭州举办!活动同期,恩智浦携手生态合作伙伴,将对会议中精彩的技术演讲全程进行网络直播,让更多的开发者足不出户,也能够直击活动现场,解锁前沿产品方案,共赴“云端”技术盛宴!直播期间,参与观众互动,还有好礼等你拿~~点击文章顶部卡片,或扫描海报二维码,约起来吧!
2025-08-28
米尔发表演讲,并携瑞萨RZ产品亮相2025 Elexcon深圳电子展
2025年8月26日-28日,Elexcon深圳国际电子展在深圳会展中心(福田)1号馆(展台号:1L30)盛大举行。作为全球电子产业链的重要盛会,展会汇聚创新技术与行业解决方案。米尔电子MYIR携RZ系列核心板、开发板等方案Demo亮相瑞萨嵌入式MCU/MPU生态专区,并发表主题演讲。技术盛宴:瑞萨RZ系列产品矩阵亮相展会上,米尔展示了基于RZ/G2L、RZ/G2UL、RZ/T2H的核心板
2025-08-28
留言领奖!2025 STM32研讨会即将启幕,米尔期待与你共会
2025年9月11日及9月17日,STM32研讨会将走进北京和上海,为大家深入解读STM32的中国战略,并围绕STM32在不同领域的最新产品布局和生态展开主题演讲,包括边缘人工智能、电源能源、无线连接、安全等,深入探讨STM32带来的前沿科技成果。同时,STM32还将携手业内多家合作伙伴,展示STM32在更多领域的解决方案及应用实例。欢迎开发者及工程师莅临现场,与ST专家面对面沟通交流,体验不同产
2025-08-28
Qwen2-VL-3B模型在米尔瑞芯微RK3576开发板NPU多模态部署指导与评测
关键词:瑞芯微 RK3576、NPU(神经网络处理器)、端侧小语言模型(SLM)、多模态 LLM、边缘 AI 部署、开发板、RKLLM随着大语言模型(LLM)技术的快速迭代,从云端集中式部署到端侧分布式运行的趋势日益明显。端侧小型语言模型(SLM)凭借低延迟、高隐私性和离线可用的独特优势,正在智能设备、边缘计算等场景中展现出巨大潜力。瑞芯微 RK3576 开发板作为一款聚焦边缘 AI 的硬件平台,
2025-08-14
12路1080P高清视频流,米尔RK3576开发板重塑视频处理极限
在智能视觉技术不断发展的今天,多路摄像数据的处理与传输已成为众多应用场景的核心需求。从智能安防监控领域的全面覆盖,到工业视觉处理网关的精准检测,再到车载环视融合平台的实时驾驶辅助以及智慧社区AI防控的快速响应,多路摄像数据的处理与传输已成为关键需求,而高效且低延时的解决方案则是实现这些应用的核心。目前多路摄像传输方案往往存在一定局限,接入路数有限,难以满足大规模监控场景的需求,且延迟较高,影响实时
2025-08-14
共建生态,米尔将出席2025安路科技FPGA技术沙龙
在数字化浪潮席卷全球的今天,FPGA技术正成为驱动创新的核心引擎。2025年8月21日,深圳将迎来一场聚焦FPGA技术与产业应用的盛会——2025安路科技FPGA技术沙龙。本次沙龙以“定制未来 共建生态”为主题,汇聚行业专家、企业代表及技术开发者,探讨前沿技术趋势,解锁定制化解决方案,共建开放共赢的FPGA生态圈!米尔作为领先的嵌入式处理器模组厂商,将携安路FPGA核心板和开发板亮相,并发表主题演
2025-08-08
如何在RK3576开发板上板端编译OpenCV并搭建应用
本文将介绍基于米尔电子MYD-LR3576开发板(米尔基于瑞芯微 RK3576开发板)的板端编译OpenCV及环境搭建方案的开发测试。摘自优秀创作者-短笛君RK3576具有如下配置:4× Cortex-A72(大核,主频最高 2.2GHz)4× Cortex-A53(小核,主频最高 1.8GHz)NPU(AI加速单元):独立 NPU,算力典型值6 TOPS(INT8)支持 TensorFlow L
2025-08-08
倒计时!米尔-安路飞龙派创意秀奖品等您领~~
创意秀活动进入倒计时阶段2025年米尔-安路飞龙派FPGA FPSoC创意开发大赛即将于8月15日正式收官(原定于6月15日,已延期到8月15日)。作为国产工业级FPGA领域的赛事,本次活动已吸引多支开发团队参与,基于MYD-YM90X开发板产出了众多创新解决方案。现距截稿仅剩7天,米尔特别提醒尚未提交作品的开发者把握最后几天,分享您的技术创作,申领米尔电子的奖品。活动链接:https://mp
2025-07-25
如何在RK3576开发板上运行TinyMaix :超轻量级推理框架--基于米尔MYD-LR3576开发板
本文将介绍基于米尔电子MYD-LR3576开发平台部署超轻量级推理框架方案:TinyMaix摘自优秀创作者-短笛君TinyMaix 是面向单片机的超轻量级的神经网络推理库,即 TinyML 推理库,可以让你在任意低资源MCU上运行轻量级深度学习模型。关键特性核心代码少于 400行(tm_layers.c+tm_model.c+arch_cpu.h),代码段(.text)少于3KB低内存消耗支持 I