

爆火的OpenClaw! 告别云端,米尔RK3576本地部署

2026-03-06

771

来源:米尔电子
1. 概述
基于最近爆火的OpenClaw项目,本文将在MYD-LR3576开发板上部署OpenClaw ,并接入飞书机器人,实现本地自托管 AI 助手。
1.1. 硬件资源
部署端:
米尔基于RK3576 核心板开发板(MYD-LR3576)、外接鼠标、键盘和屏幕
图:米尔基于RK3576 系列核心板开发板
调试端:
PC电脑(Windows系统、Ubuntu系统皆可)
1.2. 软件资源
MYD-LR3576开发板使用MYIR发布ubuntu22.04镜像。
如需烧录镜像请参考《MYD-LR3576J-GK Ubuntu 软件开发指南-V1.2》第5章节。
2. OpenClaw介绍
OpenClaw(前身为Clawdbot)是一款开源、本地优先的AI智能体,采用MIT许可证发布,由 Peter Steinberger(前 PSPDFKit 创始人)开发。
其核心定位是将大语言模型从“被动问答工具”转化为“主动执行任务的数字员工”,通过自然语言交互完成文件处理、系统操作、多工具协同等实际任务。
2.1. 主要功能
通过常用的聊天工具(Telegram、WhatsApp、飞书、钉钉、 等)直接对话
能实际执行操作:浏览网页、操作电脑、写文件、跑脚本、管理日程、发邮件、写代码、定时提醒
支持长期记忆(记住你的偏好、项目背景)
可扩展 Skills(技能插件),社区已有很多现成技能
本地优先、自托管、数据不上传云端(隐私保护)
支持几乎所有主流大模型(Claude、Gemini、OpenAI、Grok、Ollama 本地模型、阿里千问、GLM 等)
2.2. 项目特性
OpenClaw并非简单的对话应用,而是一个可自定义、可扩展的AI智能体平台,支持本地部署与云端部署双模运行,适配从嵌入式设备(树莓派、RK3576开发板)到高性能服务器的全类型计算设备。
3. OPENCLAW部署
配置openclaw安装环境并下载安装,初始化openclaw配置。
3.1. 安装openclaw
安装openclaw
root@rk3576:~# npm install -g openclaw@latest
npm warn deprecated inflight@1.0.6: This module is not supported, and leaks memory. Do not use it. Check out lru-cache if you want a good and tested way to coalesce async requests by a key value, which is much more comprehensive and powerful.
npm warn deprecated are-we-there-yet@2.0.0: This package is no longer supported.
npm warn deprecated gauge@3.0.2: This package is no longer supported.
npm warn deprecated rimraf@3.0.2: Rimraf versions prior to v4 are no longer supported
npm warn deprecated npmlog@5.0.1: This package is no longer supported.
npm warn deprecated glob@7.2.3: Old versions of glob are not supported, and contain widely publicized security vulnerabilities, which have been fixed in the current
3.2. 配置openclaw
1). 执行配置指令

图3-1. 配置启动界面
2). 启动模式
选择QuickStart模式

图3-2. 模式选择
3). 模型选择
这里选择提供免费tokens次数的Qwen,或者直接使用其他已有api-key的模型。

图3-3. 模型选择
4). 配置完成界面
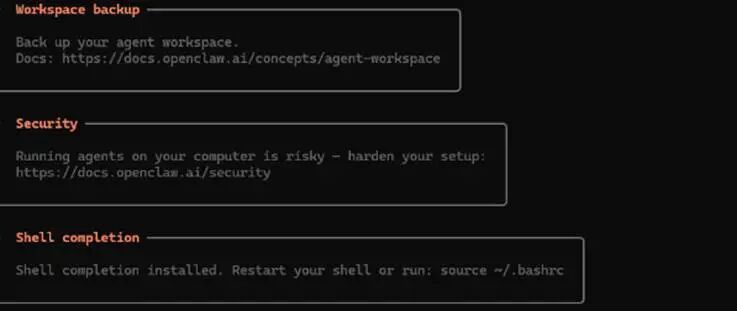
图3-4. 配置完成界面
4. 接入飞书机器人
创建飞书机器人,在openclaw安装飞书插件并接入。
4.1. 创建飞书机器人
1). 登录飞书开放平台
打开飞书开放平台网址:https://open.feishu.cn,没有账户的需先创建账户,然后点击开发者后台。
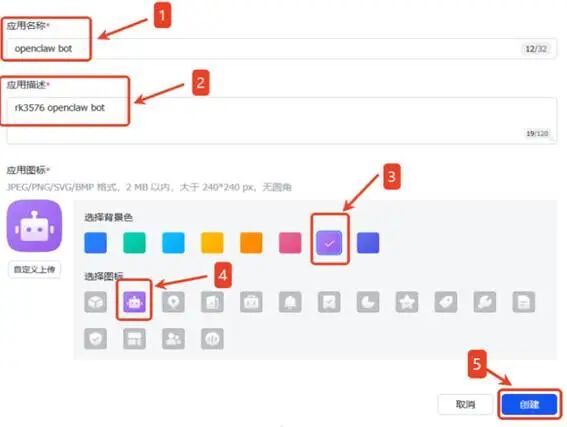
图4-1. 配置信息
2). 添加机器人能力

图4-2. 添加机器人能力
3). 配置应用权限

图4-3. 权限配置步骤
4). 导入JSON数据
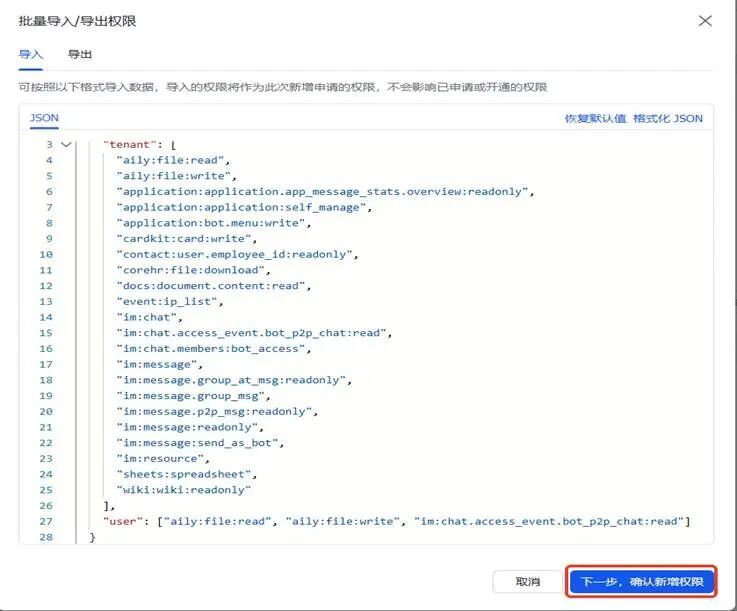
图4-4. 导入JSON
4.2. OpenClaw 接入飞书
1). 选择飞书通讯平台
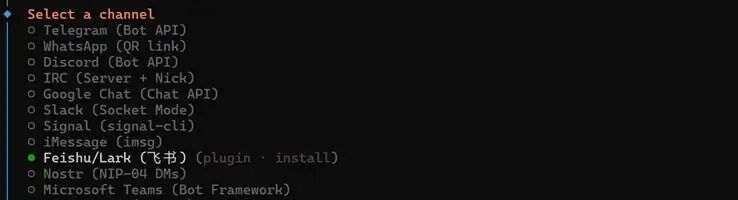
图4-5. 选择飞书

图4-6. 下载飞书
2). 飞书添加事件回调
在飞书开放平台,添加长连接订阅方式。

图4-7. 添加订阅方式

图4-8. 添加长连接
在同一界面中点击添加事件按钮,添加接收消息事件。

图4-9. 添加事件
5. 测试
5.1. 交互测试
输入消息交互:
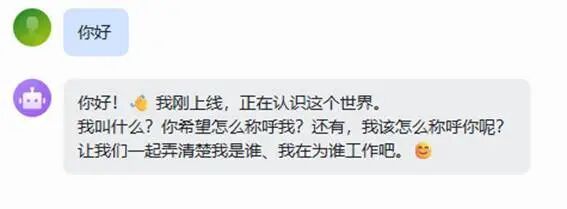
图5-1. 交互信息
使用飞书通过openclaw查看部署板信息。

图5-2. 交互信息
通过USB摄像头拍照并发送:
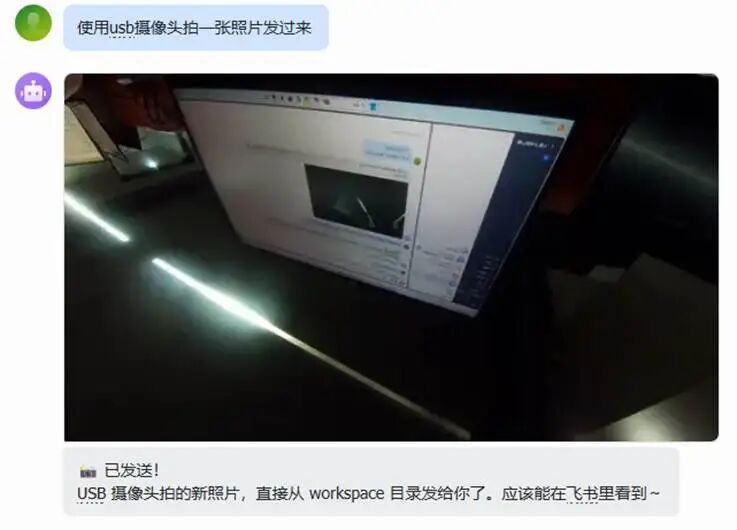
图5-3. 交互信息


2026-04-16
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔电子MYD-YF13X平台资料及SDK迎来重要更新。本次发布的V2.0.0版本在系统版本、安全能力以及功能支持方面进行了全面升级。本次发布引入安全芯片STM32MP135F,并推出搭载该芯片的全新产品MYD-YF135F。同时,对U-Boot、Linux Kernel 以及 Yocto 构建系统进行了升级和优化,为开发者提供更加安全、稳定和完善的软件平台。一、版本升级概览二、U-Boot 更新
2026-04-16
米尔RK3506 DSMC实战,Local Bus高速互联
在工业控制场景中,芯片间的高速数据交互是一个核心需求。传统方案要么依赖串口/网络等低速通道,要么需要昂贵的共享内存架构。米尔RK3506核心板的DSMC接口提供了一种新选择——通过Local Bus协议,用少量引脚实现跨芯片的高速地址空间访问。本文基于MYD-YR3506 Host+MYD-YR3506 Slave的实板联调验证,确认DSMC Local Bus链路能够稳定建立,并在512B、8-
2026-04-16
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板
随着端侧AI从“实验室探索”迈向量产化,“效率”成为了产业落地的生命线。米尔电子联合安谋科技(Arm China)极术社区,通过硬件与软件工具链的深度协同,正式推出了“MYD-LR3576核心板+JishuShell”一体化部署方案。该方案让备受关注的端侧AI Agent——OpenClaw在边缘侧的部署门槛降至冰点。步入2026年,大模型技术的竞争重心正从云端参数规模向端侧应用落地转移。端侧AI
2026-04-10
米尔RK3576 + ROS2 进阶:NPU加速MixFormerV2目标跟随与机械臂抓取实战
回顾上篇:基于RK3576+ROS2 Humble+SLAM Toolbox+Nav2,我们实现了机器人的建图与自主导航。机器人已经能够“走到哪里”。但真正的智能机器人不仅要“走到哪”,还要“看到并操作”——识别特定物体、主动跟随、近距离抓取。本文将在此基础上,集成深度摄像头,实现机器人核心功能:使用米尔RK3576 NPU加速MixFormerV2进行目标跟踪,替代传统OpenCV算法;移动底盘
2026-04-10
智造新方向 · 国产芯未来,米尔即将亮相新唐2026研讨会
在全球绿色能源与智能制造浪潮推动产业升级的当下,半导体技术的创新正持续为各领域发展注入核心动力。为深化产业技术交流、携手共探国产芯发展新机遇,新唐科技携手芯唐南京将于2026年4月14日至5月28日在全国城市巡回举办年度研讨会 ——“智造新方向・国产芯未来”。米尔电子作为新唐的合作伙伴,将携米尔基于新唐MA35D1核心板开发板及解决方案,亮相0417深圳、0421南京、0423北京等场次的研讨会。
2026-04-02
当6 TOPS不再是极限:RK3576+Hailo-8,让高帧率摄像头真正“实时”
在边缘计算领域,算力与实时性之间的博弈从未停止。近期基于米尔MYD-LR3576 开发板+PCIe M.2接口Hailo-8算力卡进行了一系列深度测试,一组实测数据,或许能帮你重新审视边缘AI的“性能天花板”。图:米尔基于RK3576开发板一、RK3576 的算力极限在哪里?RK3576内置NPU由2核组成,具备6 TOPS 算力,在常规轻量级模型推理中表现不俗。但在实际项目中,我们通过多路并发测
2026-03-27
新品!从MINI到工业板:米尔T153开发板工业场景全覆盖
今年1月,米尔发布了MYD-YT153MX-MINI开发板,该产品精准切入国产核心板在中端市场领域,具有极致性价比,自上市即获得良好的市场反响。为方便开发者灵活选择、适配更专业的场景,米尔电子正式推出基于同款全志T153四核异构工业处理器的MYD-YT153MX工业开发板,两款开发板形成完整组合,下面来详细介绍工业开发板的不同之处。工业开发板——为严苛场景而生工业开发板:定位工业应用开发与评估,接
2026-03-19
新品!瑞萨RZ/T2H驱控一体单芯、多轴实时控制,助力工业以太网
米尔电子发布基于瑞萨高端MPU处理器RZ/T2H的CPU模组-MYC-YT2HX核心板及开发板。该产品在前代产品RZ的基础上进行了全面升级,RZ/T2H以其强大的硬件支持、全面的软件开发工具、丰富的工业以太网协议和安全解决方案,以及多操作系统的灵活配置,为客户提供了一个全方位、高效率的开发环境。MYC-YT2HX核心板的推出,旨在解决工业数字化进程中对高性能产品升级以及对复杂网络控制的需求,如工业
2026-03-12
RK3576 + ROS2 SLAM建图与导航实战
前言文档定位与目标读者本文档面向具备一定ROS基础、希望深入理解并在实际项目中部署ROS2 Humble + SLAM Toolbox + Nav2完整建图与导航系统的机器人工程师。我们将从零开始,基于米尔RK3576开发板逐步构建一个功能完备的自主移动机器人系统,涵盖环境搭建、机器人建模、SLAM建图、自主导航以及生产级系统的优化与排错。为什么选择SLAM Toolbox + Nav2?在ROS
2026-03-12
米尔亮相德国嵌入式展2026 Embedded World
2026年3月10日,全球嵌入式系统领域的年度盛会——Embedded World在德国纽伦堡展览中心盛大启幕。作为领先的嵌入式处理器模组厂商,米尔电子携全系列嵌入式核心板、开发板及创新解决方案重磅亮相,与来自全球40多个国家的1100余家展商、32000余名专业观众共赴这场技术盛宴。Embedded World自创办以来,已成为全球规模最大、影响力最深远的嵌入式系统展览会,聚焦嵌入式硬件系统、软