

如何在米尔-STM32MP257开发板上实现环境监测系统

2025-04-17

1586

来源:米尔电子
一、前言
环境监测是当前很多场景需要的项目,刚好我正在论坛参与的一个项目:Thingy:91X 蜂窝物联网原型开发平台的试用。把两个项目结合起来,实现一个简单的环境监测系统。
二、硬件平台
1、米尔-STM32MP257开发板
2、Thingy:91X
三、项目规划
4、接收数据并在UI界面中展示。
四、QT设计
1、QT安装
Index of /qtproject/official_releases/online_installers/


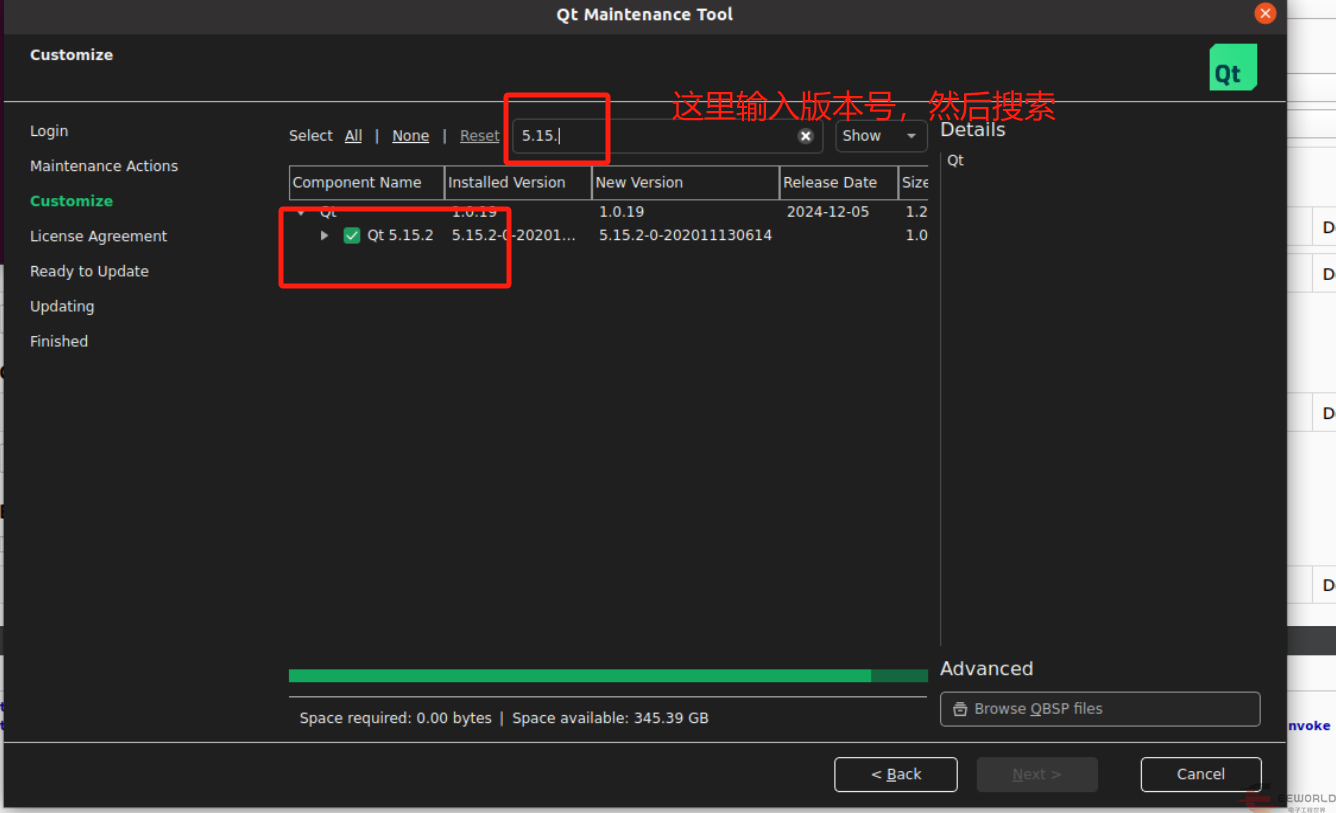
其他的按官方的教程就可以安装了。
2、Kit的配置

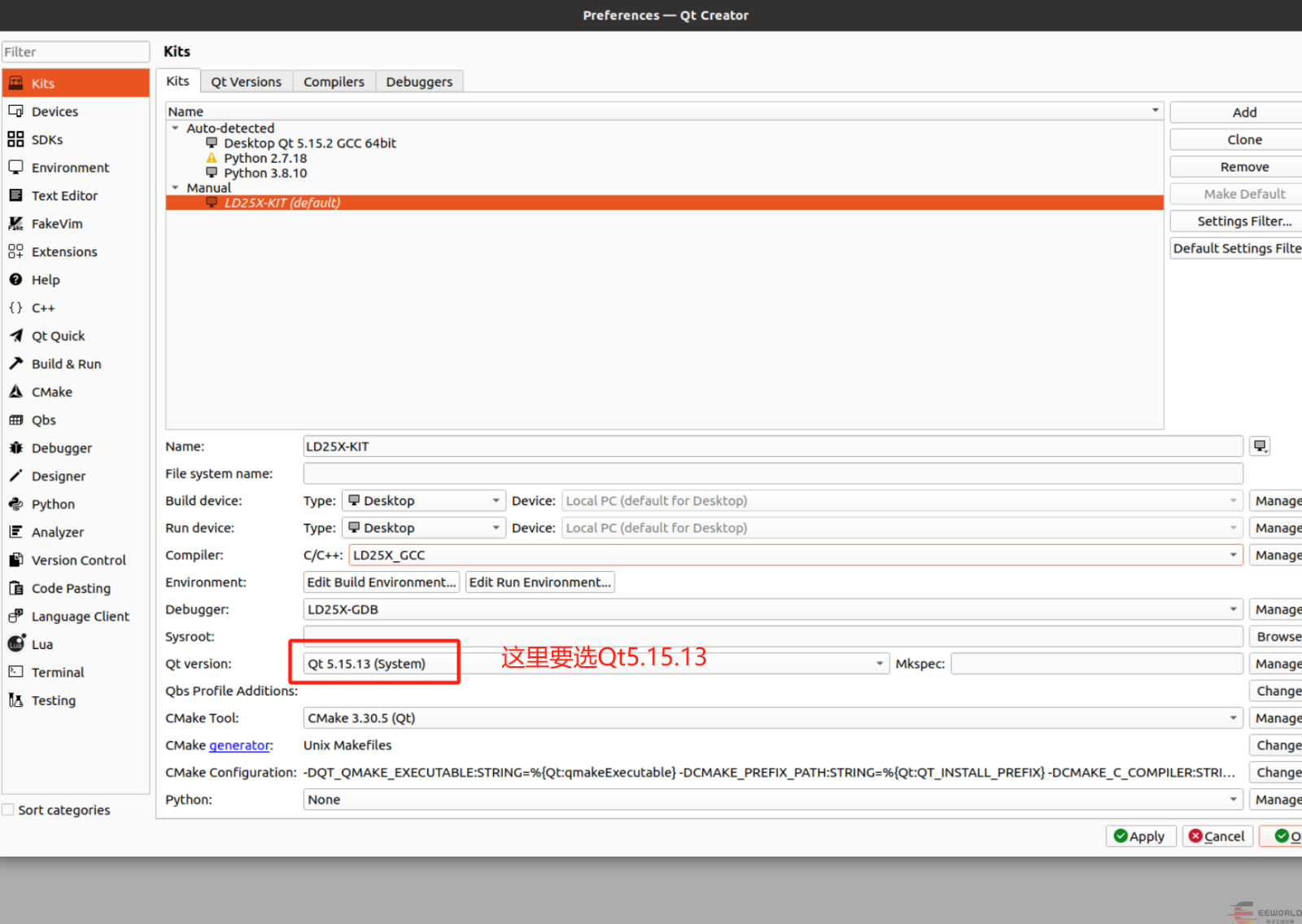

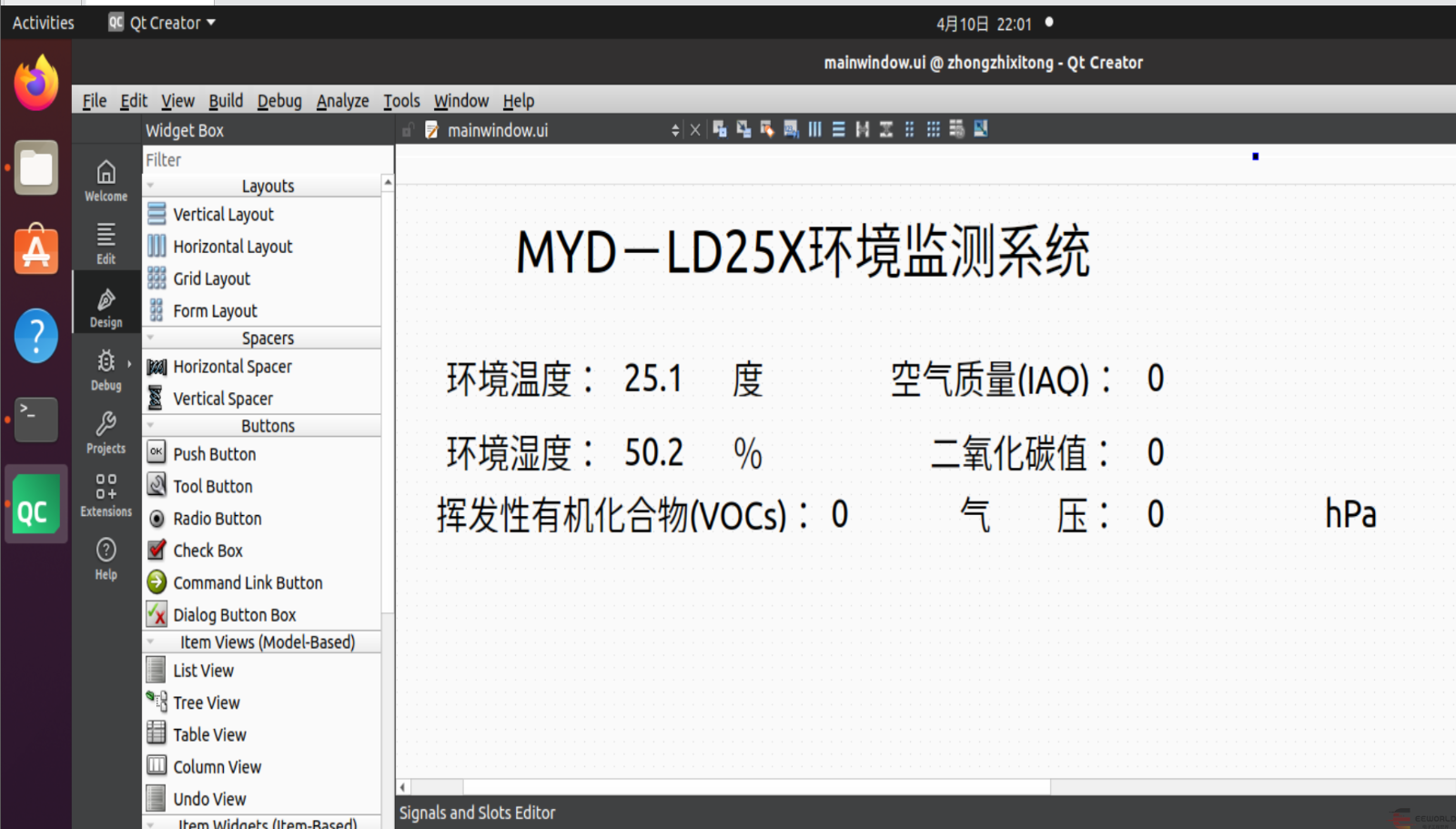
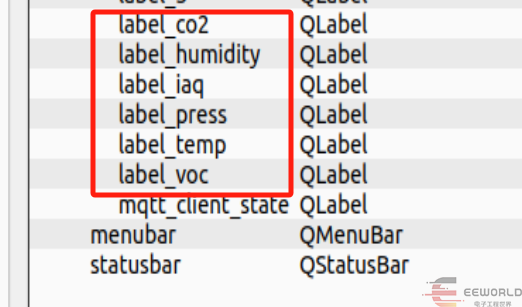
给相应的需要显示的label根据接收的数据,定义了相应的标签值:
#include <QtMqtt/QMqttClient>
【注】在官方发布的固件中,是没有QTMqtt的连接文件的,当运行带的QtMqtt的程序会报错:
error while loading shared libraries: libQt5Mqtt.so.5: cannot open shared object file: No such file or directory
需要从SDK中复制到开发板目录中。
同时为了实现检测与MQTT服务器的连接状态,需要引入一个线程,用于检测是否连接到服务器:
void run() override
{
while (true)
{
if (m_client)
{
QString statusText = m_client->state() == QMqttClient::Connected
? "连接服务器:成功"
: "连接服务器:失败";
emit updateStatus(statusText);
}
msleep(1000); // 每秒检测一次
}
}MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent), ui(new Ui::MainWindow), m_client(new QMqttClient(this)) // 初始化MQTT客户端实例
{
ui->setupUi(this);
// 设置MQTT客户端参数
m_client->setHostname("hostname");
m_client->setPort(1883); // 默认MQTT端口
m_client->setClientId("client_id");
m_client->setUsername("usrename");
m_client->setPassword("pwd");
// 连接信号槽,处理连接成功事件
connect(m_client, &QMqttClient::connected, this, [this]()
{
// 连接成功,修改label的文本
ui->mqtt_client_state->setText("连接服务器:成功");
// 订阅主题
m_client->subscribe(QMqttTopicFilter("devacademy/publish/topic")); });
// 连接信号槽,处理消息接收事件
connect(m_client, &QMqttClient::messageReceived, this, &MainWindow::onMessageReceived);
// 启动MQTT连接
m_client->connectToHost();
// 创建并启动连接状态检测线程
MqttConnectionChecker *checker = new MqttConnectionChecker(m_client, ui->mqtt_client_state, this);
connect(checker, &MqttConnectionChecker::updateStatus, this, [this](const QString &status)
{ ui->mqtt_client_state->setText(status); });
checker->start();
}void MainWindow::onMessageReceived(const QByteArray &message, const QMqttTopicName &topic)
{
Q_UNUSED(topic);
// 解析JSON数据
QJsonDocument doc = QJsonDocument::fromJson(message);
if (!doc.isNull() && doc.isObject())
{
QJsonObject obj = doc.object();
double temp = obj.value("temp").toDouble();
double press = obj.value("press").toDouble()/100;
double humidity = obj.value("humidity").toDouble();
int iaq = obj.value("iaq").toInt();
double co2 = obj.value("co2").toDouble();
double voc = obj.value("voc").toDouble();
//将这些数据更新到UI
ui->label_temp->setText(QString::number(temp, 'f', 2));
ui->label_press->setText(QString::number(press, 'f', 2));
ui->label_humidity->setText(QString::number(humidity, 'f', 2));
ui->label_iaq->setText(QString::number(iaq, 'f', 2));
ui->label_co2->setText(QString::number(co2, 'f', 2));
ui->label_voc->setText(QString::number(voc, 'f', 2));
// 在这里可以将解析后的数据更新到UI或其他处理逻辑
}
else
{
qDebug() << "Invalid JSON message received";
}
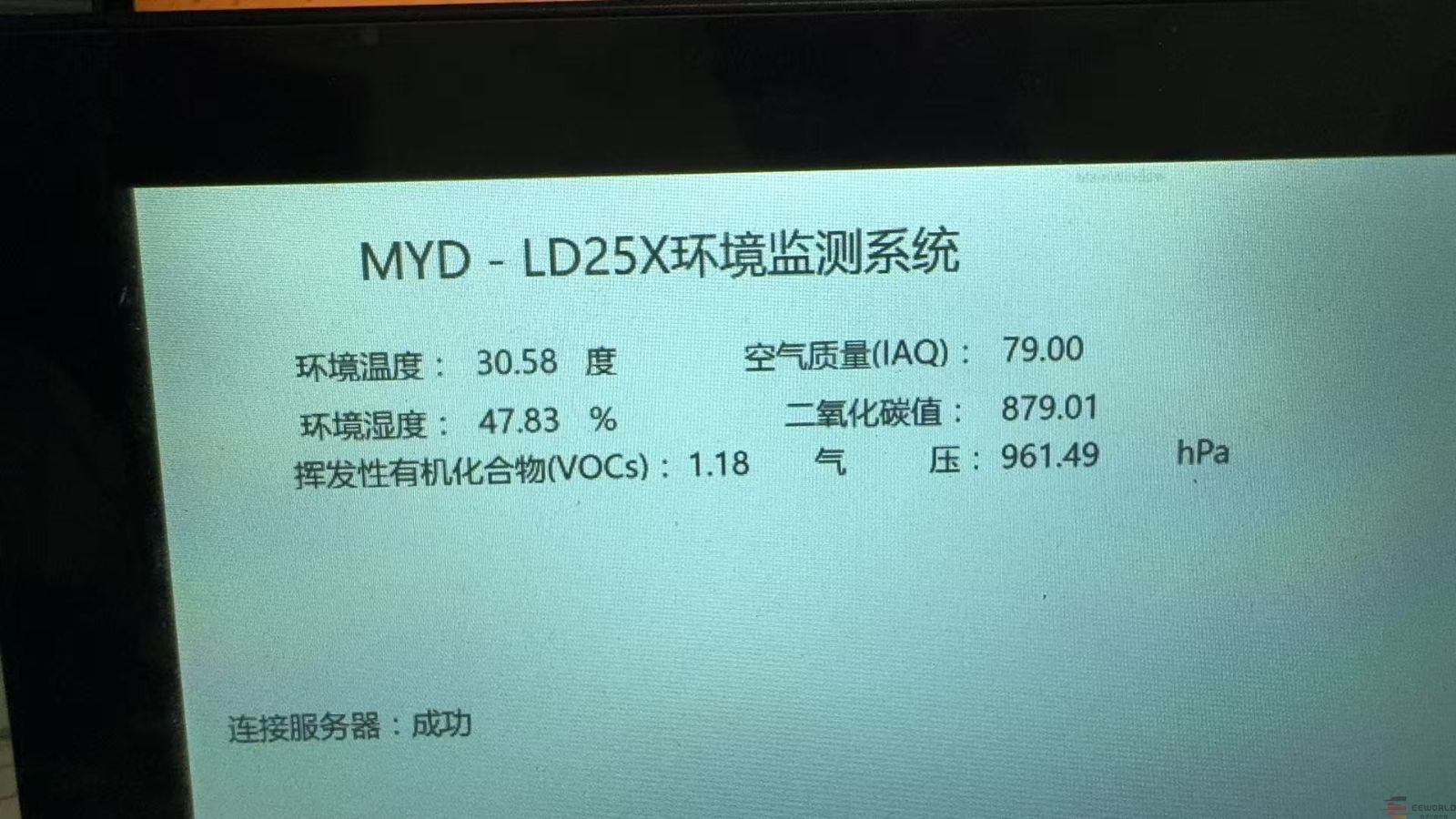
}五、实验效果
编译好程序后,上传到开发板,运行后,效果如下:
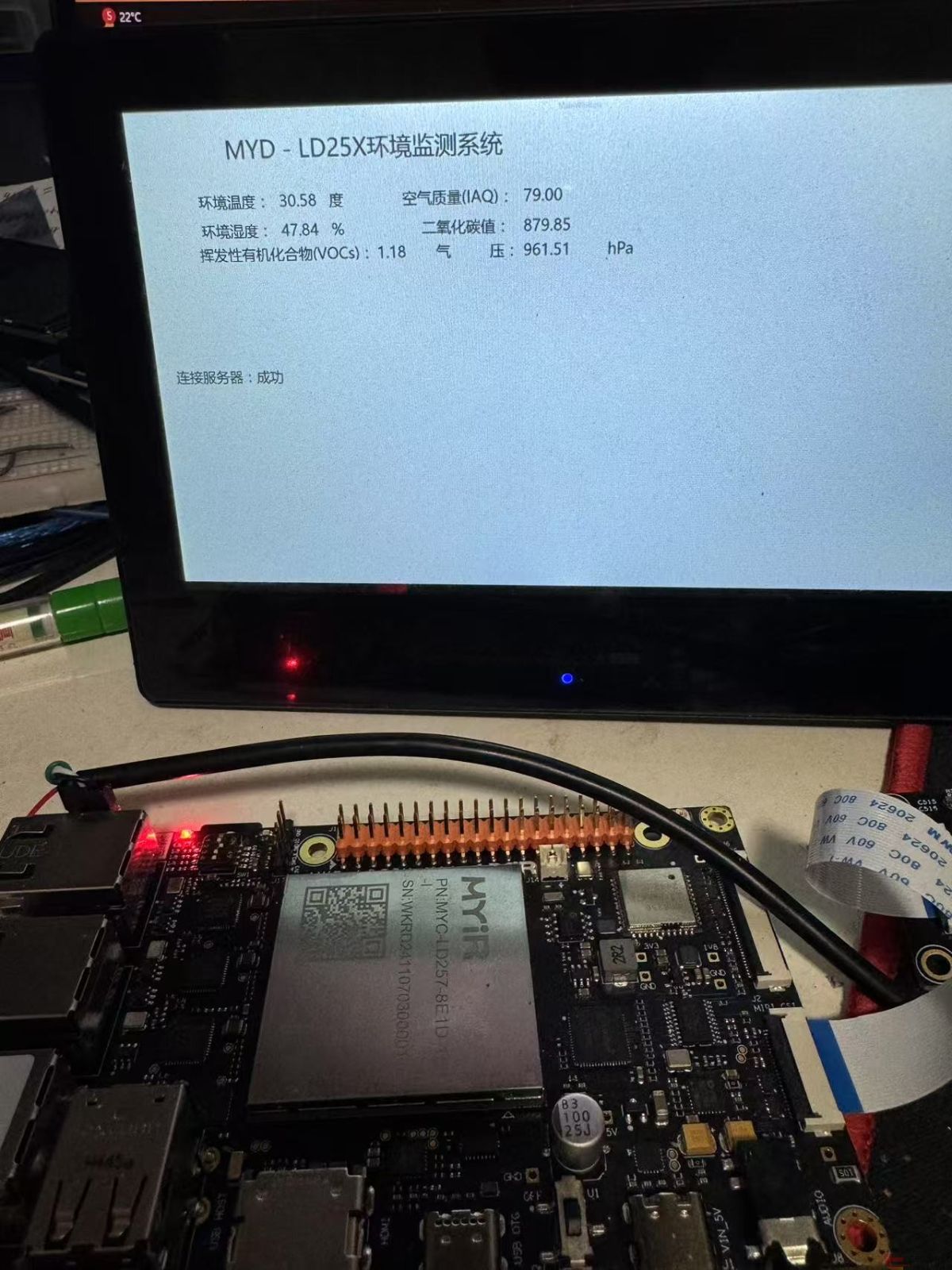
六、总结
米尔-STM32MP257开发板,通过QT来设计UI界面,通过mqtt来订阅指定的主题,实现环境监测。在物联网方面大有作为!


纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
EdgeLock® 硬件级防护落地,米尔MYD‑LMX9X V2.0.0 引入安全系统
RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
RK3576 MIPI Camera ISP调试:主观调优与工程实战(下)
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
5.13深圳,米尔邀您参加安路科技AEC FPGA技术沙龙
2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔RK3506 DSMC实战,Local Bus高速互联
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板