

MYD-LD25X Cortex-M33实时核开发实战解析

2025-11-06

828

来源:米尔电子
在嵌入式系统设计中,如何平衡高性能计算与实时控制一直是工程师面临的挑战。STM32MP257的异构架构为这一难题提供了优雅的解决方案,而其中的Cortex-M33实时核更是实现硬实时性能的关键所在。
一、异构架构:分工明确,效能卓越
STM32MP257采用创新的双核子系统设计:
Cortex-A35应用核(双核1.5GHz):运行Linux系统,负责复杂UI、网络通信、文件管理等非实时任务。
Cortex-M33实时核(400MHz):专攻实时控制,具备纳秒级中断响应,集成FPU和DSP指令集。
二、架构优势凸显
硬件级资源隔离:通过RIF单元确保M33核独占关键外设,避免核间冲突
能效精细控制:支持独立电源域,M33可在A核休眠时单独运行
安全可靠:TrustZone技术,为关键代码提供硬件级保护
三、OpenAMP:异构通信的桥梁
OpenAMP是异构系统中核心间消息通信的开源框架,基于RPMsg+共享内存+中断,让Linux核和Cortex-M核可以可靠地传递消息和数据,高效地共享数据或协调任务的机制,简化异构多核开发。
在STM32MP257中,典型实现方式包括remoteproc+virtio+RPMsg等。它的核心目标是让Cortex-A核和Cortex-M核协同工作,同时保持资源隔离和实时性能。
Remoteproc框架
STM32MP257使用了RemoteProc框架让A核运行的Linux系统可以更加轻松的和M核进行通信控制,RemoteProc主要作用就是对远程处理器的生命周期进行管理,即启动、停止远程处理器。该框架还会创建 RPMsg Virtio 设备。以下是RemoteProc的逻辑框图:
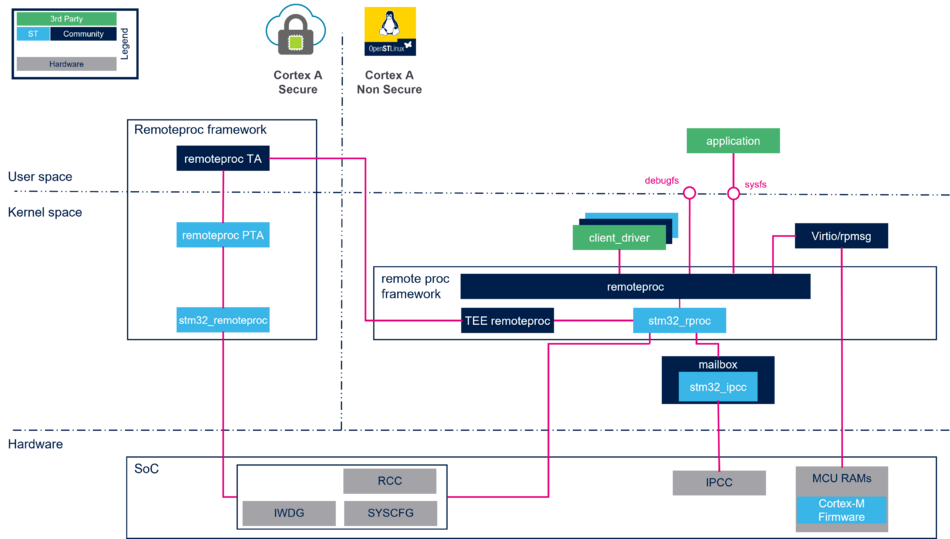
图1 RemoteProc运行逻辑
在RemoteProc框架中,需要在Linux系统中将M核的固件通过命令加载到M核的内存中。
RPMsg框架
RPMsg框架( Remote Processor Messaging Framework )则是实现对远程处理器信息传递。RPMsg是基于VirtIO的消息总线,它允许内核驱动程序与系统上可用的远程处理器进行通信。通讯框架入下图:
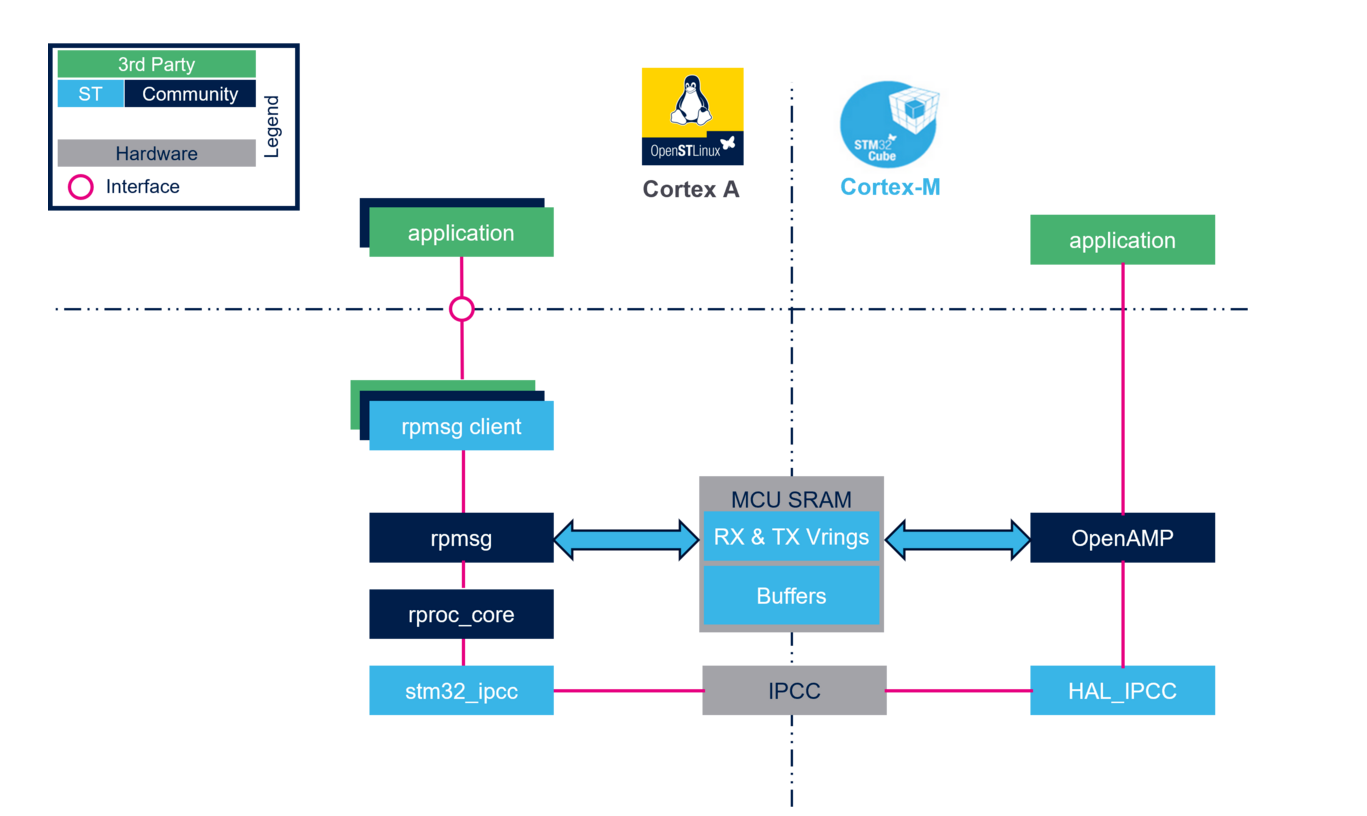
图2 RPMSG框架
消息服务基于共享内存,使用RPMsg 和 Virtio 框架,RemoteProc框架则控制远程处理器生命周期。信号通知( Mailbox )服务则基于内部IPCC( Inter-Processor communication controller ),ST提供 OpenAMP相关库。
Virtio(虚拟化模块)
Virtio 是一个支持虚拟化的 I/O 框架,通过共享环形缓冲区(vring)提供高效的消息传输层。Virtio中有两个单向的vring,分别用于处理器之间的消息传递,RX VRING 用于接收来自远程处理器的消息,TX VRING专用于将消息发送到远程处理器。
四、实战演练:异核控制LED
基于异构通讯框架,A核通过发送LED控制命令,驱动M33核响应并实现LDE灯的开关操作。
在构建前需要将开发板设备树中的gpio_led的蓝灯关闭,关闭A核占用,设备树中修改位置具体如下:
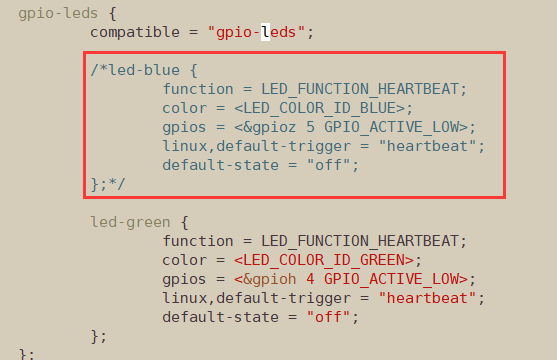
图3 设备树屏蔽蓝灯
关闭后将设备树单独构建并更新到开发板中,具体方式请查阅《MYD-LD25X Linux 软件开发指南》中4.3章节。
在IDE中导入OpenAMP_TTY_echo_Led例程,导入完成后如下所示:
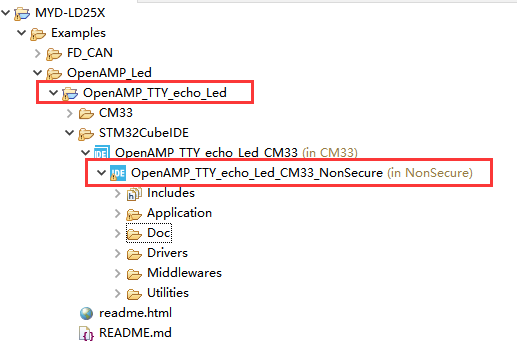
图4 例程导入
该例程由官方例程OpenAMP_TTY_echo修改,主要修改即为下图中虚拟串口回调函数的框选部分:
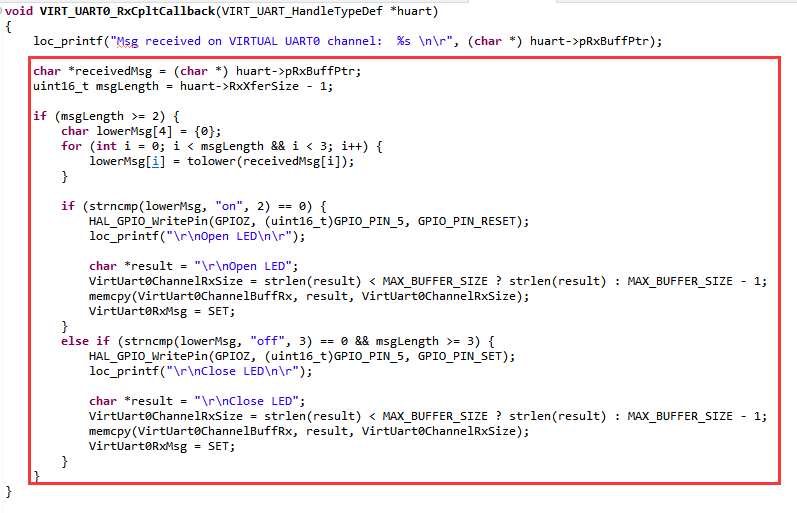
图5 回调函数修改
实现过程比较简单,基本是对A核的消息进行了判断处理,针对GPIO的主要控制使用了HAL_GPIO_WritePin函数,该函数位于Drivers/BSP/stm32mp2xx_hal_gpio.c:
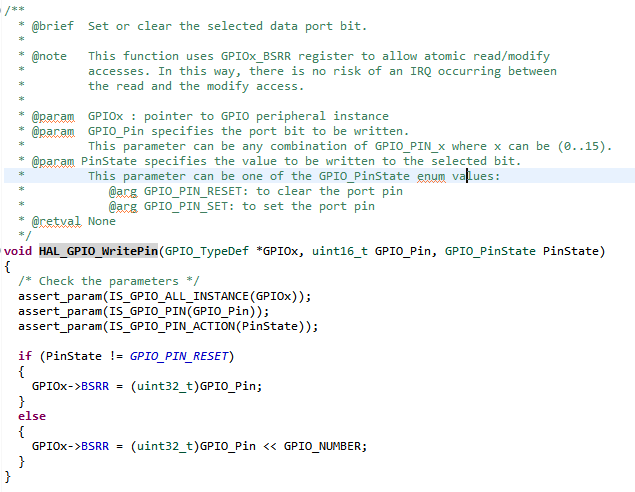
图6 函数实现
程序运行流程图:
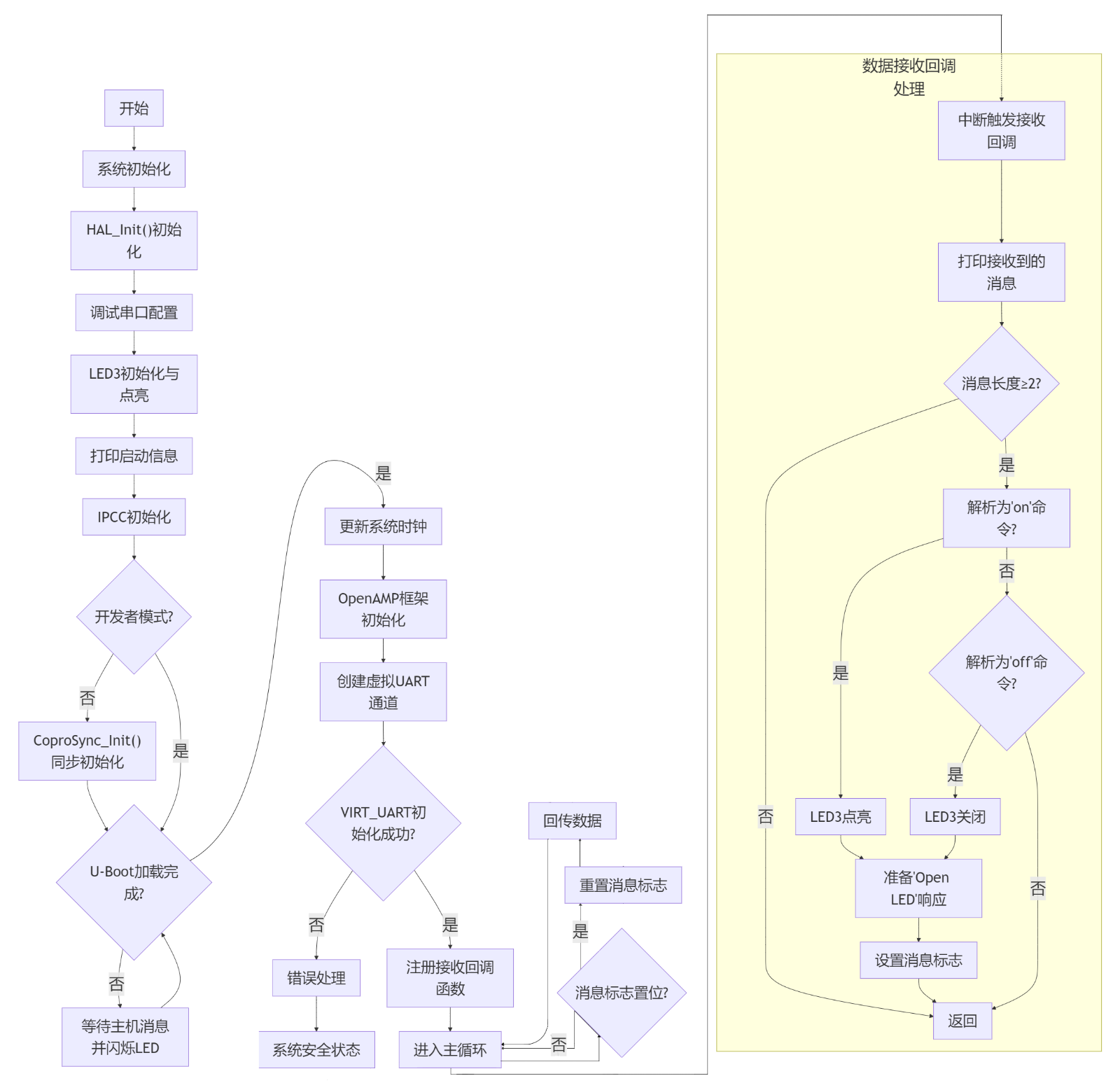
图7 OpenAMP_TTY_echo_Led流程图
然后继续构建,点击上图4中的OpenAMP_TTY_echo_Led_CM33_NonSecure,然后点击上方锤子右边箭头并选择CA35TDCID_m33_ns_sign:
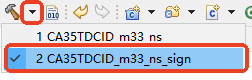
图8编译选择
选择后会立即构建编译,完成后在CA35TDCID_m33_ns_sign目录中拷贝elf文件到开发板中:
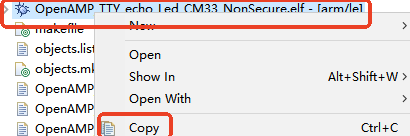
图9 拷贝文件
确保在开发板中目录结构如下:

图10 目录结构
输入以下内容执行脚本,运行后如图所示:
root@myd-ld25x:~/OpenAMP_TTY_echo_Led# ./fw_cortex_m33.sh start

图11 运行程序
在A核输入以下命令后台监控M核虚拟串口反馈:
root@myd-ld25x:~/OpenAMP_TTY_echo_Led# cat /dev/ttyRPMSG0 &
root@myd-ld25x:~/OpenAMP_TTY_echo_Led#
输入以下命令控制Led蓝灯亮灭:
root@myd-ld25x:~/OpenAMP_TTY_echo_Led# echo on > /dev/ttyRPMSG0
root@myd-ld25x:~/OpenAMP_TTY_echo_Led# echo off > /dev/ttyRPMSG0
结果如下:
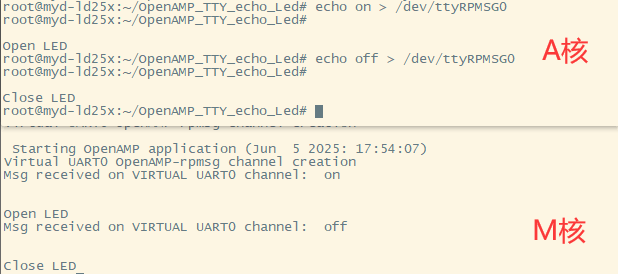
图12 运行结果
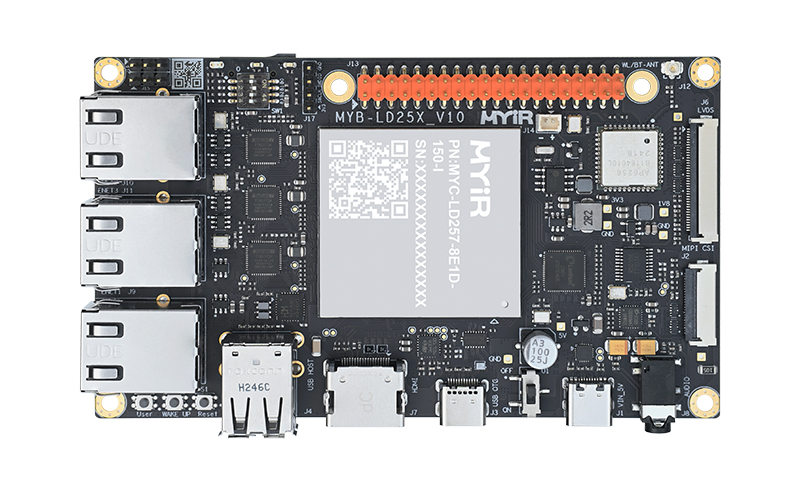
图13 米尔基于STM32MP257核心板及开发板


纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
EdgeLock® 硬件级防护落地,米尔MYD‑LMX9X V2.0.0 引入安全系统
RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
RK3576 MIPI Camera ISP调试:主观调优与工程实战(下)
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
5.13深圳,米尔邀您参加安路科技AEC FPGA技术沙龙
2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔RK3506 DSMC实战,Local Bus高速互联
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板