

【深度实战】米尔MYD-LR3576 AMP非对称多核开发指南:从配置到实战

2025-12-05

1163

来源:米尔电子
一、什么是AMP?为什么重要?
AMP(Asymmetric Multi-Processing)非对称多处理架构,允许单个芯片的不同核心运行不同的操作系统或裸机程序。相比传统的SMP(对称多处理),AMP具有独特优势。
核心特性:
异构运算:不同核心运行最适合的操作系统,如Linux处理复杂应用,RT-Thread保障实时任务;
资源隔离:各核心拥有独立内存空间,避免资源冲突;
灵活通信:通过共享内存、RPMSG等方式实现高效核间通信;
商业价值:
成本优化:单芯片替代多芯片方案,减少PCB面积和元器件数量;
开发灵活:支持Linux、RT-Thread、裸机程序的自由组合;
系统可靠:故障隔离,关键任务永不掉线;
二、实战选型:MYD-LR3576的AMP硬件基础
米尔核心板 MYD-LR3576 基于 RK3576 处理器,集成三大核心集群:AP 端配备 4 颗 ARM Cortex-A72 与 4 颗 ARM Cortex-A53 核心,MCU 端搭载 1 颗 ARM Cortex-M0 核心,通过 AMP 架构实现多系统异构运行,在成本优化与开发灵活性上展现突出优势。
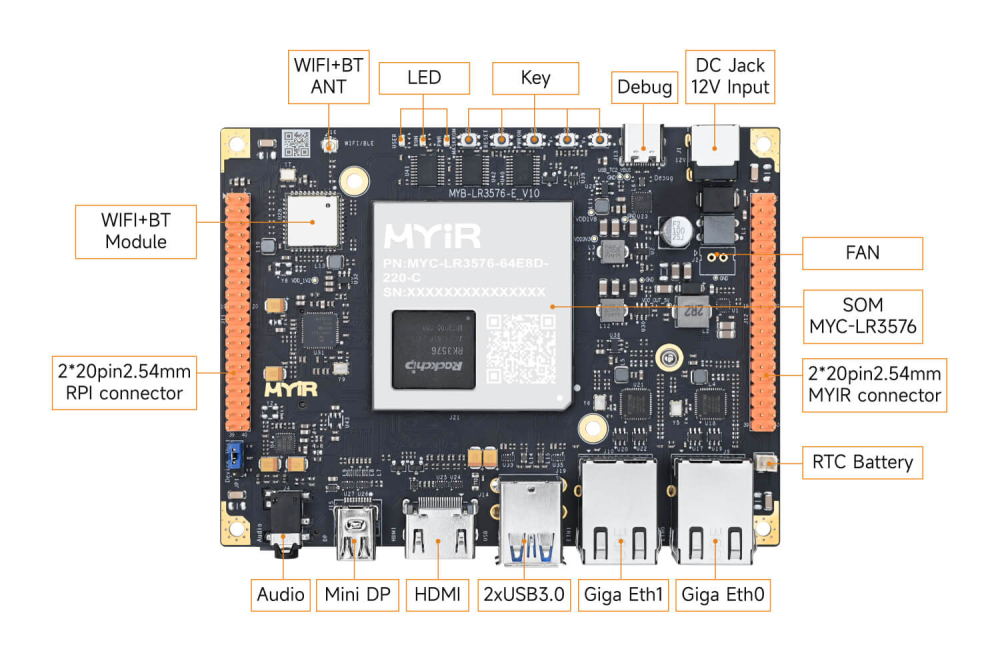
MYD-LR3576开发板
三大核心集群:

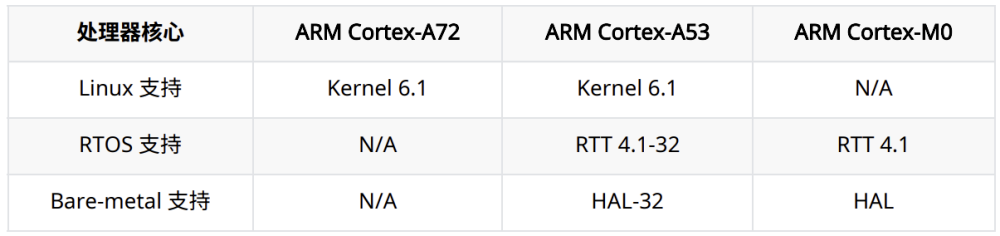
系统支持:
已验证AMP方案:
AP+AP架构:Linux + RT-Thread/Bare-metal
AP+MCU架构:Linux + MCU RT-Thread/Bare-metal
三、实战操作:AMP 系统串口资源配置
实战目标:基于MYD-LR3576开发板,详细讲解Linux与RT-Thread侧的串口资源配置全流程,实现从理论到实践的完整落地。
3.1 Linux 侧串口资源的剥离与分配
在 AMP 架构中,若需将 UART6 分配给 RT-Thread 从核使用,需先在 Linux 设备树中完成资源剥离,避免 Linux 内核对该外设的占用。
1.失能UART6: Linux 设备树通过节点状态配置控制外设的启用 / 禁用。对于 UART6,需在其节点中添加 “status = "disabled"” 属性,明确告知 Linux 内核:该串口不再由 Linux 管理。
&uart6 {status = "disabled"; // 剥离Linux对UART6的控制权};
2.分配UART6 资源
剥离后的 UART6 资源需通过 rockchip_amp 节点重新分配给从核,配置内容包括时钟资源、引脚功能与中断路由:
&rockchip_amp {clocks = <...>, <&cru SCLK_UART6>, <&cru PCLK_UART6>;pinctrl-0 = <&uart6m3_xfer>;amp-irqs = <GIC_AMP_IRQ_CFG_ROUTE(114, CPU_GET_AFFINITY(3, 0))>;};
3.分配从核内存
为避免 Linux 内核占用从核的运行内存,需在 reserved-memory 节点中划分专属内存区域。例如,为 RT-Thread 从核预留 8MB 内存:
amp_reserved: amp@41800000 {reg = <0x0 0x41800000 0x0 0x00800000>; // 起始地址0x41800000,大小8MBno-map; // 禁止Linux映射该区域,确保从核独占};
3.2 RT-Thread 侧 UART6 的初始化与启用
Linux 侧完成资源剥离后,需在 RT-Thread 中对 UART6 进行初始化,使其具备通信能力。RT-Thread 的配置流程主要包括引脚复用、中断路由与外设使能三步。
1.UART6 引脚复用配置
RK3576 的引脚支持多功能复用,UART6 的 TX/RX 引脚需配置为对应功能模式(如 Func13)。通过 RT-Thread 的硬件抽象层(HAL)接口,可直接完成引脚功能的配置:
#ifdef RT_USING_UART6uart6_m3_iomux_config();#endifvoid uart6_m3_iomux_config(void){HAL_PINCTRL_SetIOMUX(GPIO_BANK4, GPIO_PIN_C5, PIN_CONFIG_MUX_FUNC13);HAL_PINCTRL_SetIOMUX(GPIO_BANK4, GPIO_PIN_C4, PIN_CONFIG_MUX_FUNC13);}
2.UART6 中断路由配置
为确保 UART6 的中断能被 CPU3(从核)响应,需通过 GIC 中断控制器的路由配置,将 UART6 的中断号与 CPU3 绑定。RT-Thread 提供了简洁的条件编译选项:
#ifdef RT_USING_UART6GIC_AMP_IRQ_CFG_ROUTE(UART6_IRQn, 0xd0, CPU_GET_AFFINITY(3, 0));#endif
3.UART6 RTOS侧使能
通过在 RT-Thread 的配置文件中启用对应选项,使能 UART6条件编译:
CONFIG_RT_CONSOLE_DEVICE_NAME="uart6"CONFIG_RT_USING_UART6=y
四、编译部署:AMP系统镜像构建
4.1 编译镜像
完成配置后,返回 SDK 工程根目录,执行编译脚本:
cd MYD-LR3576./build.sh lunch1. rockchip_defconfig2. rockchip_rk3576_myd_lr3576_amp_defconfig3. rockchip_rk3576_myd_lr3576_defconfig4. rockchip_rk3576_myd_lr3576_mcu_defconfigWhich would you like? [1]: 2...../build.sh # 完整编译
编译成功后,生成的系统镜像文件路径为:
ls output/update/Image/update.imgupdate.img
4.2 烧录镜像至开发板
请使用瑞芯微官方烧录工具RKDevTool 将镜像写入开发板。
五、功能验证
5.1 验证环境搭建
连接开发板 Debug 口:串口参数设为 115200 波特率、8 数据位、1 停止位、无校验位;
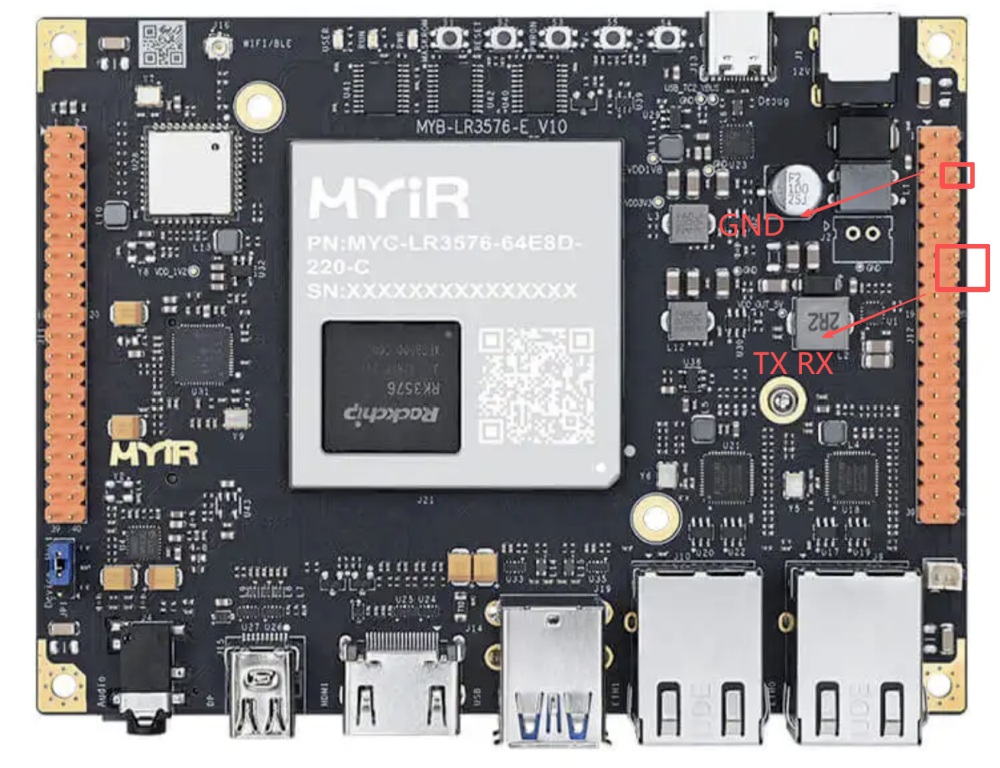
连接开发板 UART6 串口(具体位置如下图):参数设为 1500000 波特率、8 数据位、1 停止位、无校验位。
5.2 主核验证(Linux终端)
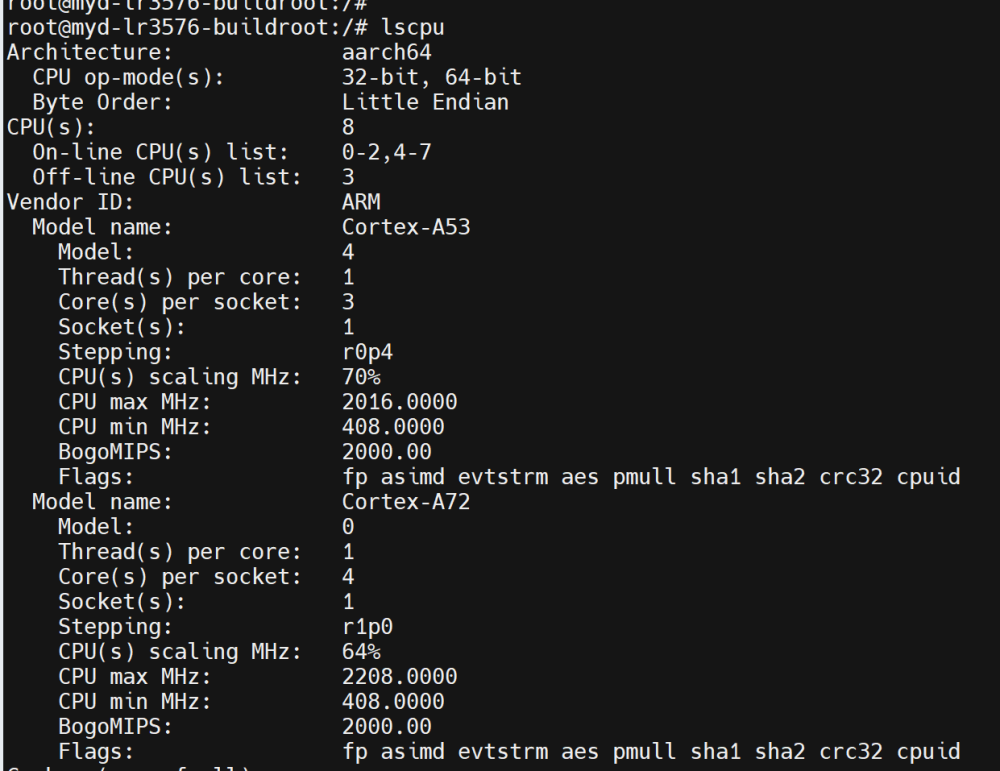
打开主核debug终端,输入lscpu命令查看CPU信息,若Cortex-A53核心数量显示为3(原4颗,1颗分配给RT-Thread),说明主核配置生效:
lscpu# 输出结果中
Cortex-A53核心数为3
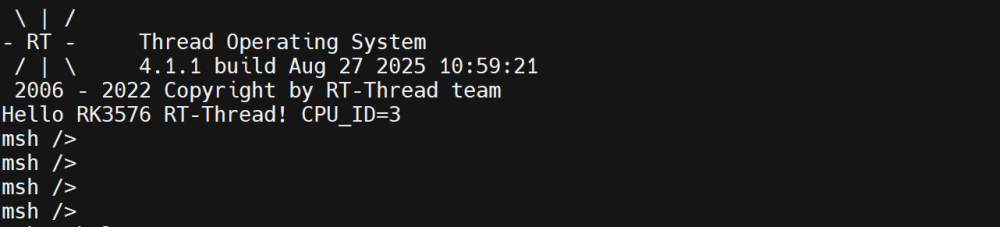
5.3 从核验证(RT-Thread终端)
打开UART6对应的串口终端(波特率默认1500000),若能看到RT-Thread的启动日志,说明从核系统已成功运行,UART6外设正常工作。
六、总结
本次串口资源配置实战,清晰地验证了外设从Linux侧剥离、再分配至RT-Thread侧的核心方法论。这仅是AMP灵活性的起点,基于相同的配置逻辑,开发者还可将GPIO、I2C、SPI等更多外设进行精细化分配。
这种灵活的异构计算模式,使其能够无缝适配多类对性能、实时性与功耗有综合要求的工业与嵌入式场景。其典型应用模式可归纳如下:
1.工业网关:Linux运行网络协议栈、数据库与Web服务,实现数据上云与远程管理;RT-Thread则实时采集PLC数据、精准控制执行器,保障工业现场毫秒级响应与确定性。
2.机器人控制器:Linux承载SLAM算法、视觉感知、路径规划与人机交互界面;RT-Thread专责多轴电机闭环控制、高频率传感器融合及硬实时安全连锁。
3.智能音视频设备:Linux处理高清音视频编解码、AI模型推理及云服务对接;独立Cortex-M0核心则实现低功耗待机、语音关键词唤醒与触控检测,显著优化系统功耗与响应速度。

AMP架构的价值,正是在于让开发者能够根据场景需求,在同一硬件平台上自由调配计算资源,实现性能、成本与功耗的最佳平衡。



纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
EdgeLock® 硬件级防护落地,米尔MYD‑LMX9X V2.0.0 引入安全系统
RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
RK3576 MIPI Camera ISP调试:主观调优与工程实战(下)
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
5.13深圳,米尔邀您参加安路科技AEC FPGA技术沙龙
2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔RK3506 DSMC实战,Local Bus高速互联
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板