

赋能欧标充电桩市场:OCPP协议实战开发指南

2025-12-11

872

来源:米尔电子
随着全球电动汽车产业的迅猛发展,充电基础设施的智能化与标准化已成为行业迫切需求。OCPP(Open Charge Point Protocol即开放充电点协议)作为连接充电桩与中央管理系统的"通用语言",正成为解决设备互联互通难题的关键技术。

一、OCPP:为何是出海欧标的必选项?
OCPP是一个开放、标准的通信协议,它确保了不同制造商生产的充电桩能够与任何兼容的后台管理系统进行无缝通信。集成OCPP协议意味着为产品赋予“标准通信接口”,其核心价值在于:
打破互联壁垒:使充电桩能接入任何符合OCPP标准的第三方运营平台,提升产品适配性;
满足法规要求:满足欧盟对充电设施互操作性的强制法规,是市场准入的前提;
解锁智能功能:支持远程控制、充电计费、状态监控与固件OTA,大幅减少上层应用开发量;
降低集成成本:采用广泛认可的协议栈,避免私有协议带来的定制开发和长期维护成本。
二、MicroOcpp:专为嵌入式设备优化的轻量级方案
针对资源受限的嵌入式环境,MicroOcpp提供了理想的OCPP协议栈实现,其主要优势包括:
极低资源占用:采用C/C++编写,专为微控制器和嵌入式Linux优化;
全面协议支持:完整兼容OCPP 1.6,并支持升级至2.0.1;
模块化设计:可仅编译所需功能,最大化利用硬件资源;
开发友好:提供清晰的API接口与丰富的示例,集成门槛低。
三、部署实践:从零构建OCPP通信系统
1、服务端环境搭建
使用Docker容器快速部署SteVe OCPP服务器,SteVe作为开源中央管理系统,提供了完整的充电桩管理能力,包括WebSocket通信维护、充电状态监控、远程控制指令下发等功能。
xmr@ubuntu:~/MicroOCPP$ wget xmr@ubuntu:~/MicroOCPP$ tar -xzvf steve-3.6.1.tar.gz xmr@ubuntu:~/MicroOCPP$ cd steve-steve-3.6.1 xmr@ubuntu:~/MicroOCPP/steve-steve-3.6.1$ ls docker-compose.yml k8s LICENSE.txt mvnw.cmd README.md Dockerfile LICENSE-HEADER.txt mvnw pom.xml src website
2、客户端部署关键步骤
在MYD-YF13X平台部署MicroOcpp客户端的过程中,我们充分利用了平台提供的Linux 6.6.78系统环境。首先交叉编译MicroOcpp源码库,生成针对ARM架构的优化可执行文件。随后配置GPIO引脚模拟充电枪连接状态:使用两个GPIO口分别代表两个充电接口的状态检测。
xmr@ubuntu:~$ mkdir MicroOCPP xmr@ubuntu:~$ cd MicroOCPP xmr@ubuntu:~/MicroOCPP$ git clone --recurse-submodules https://github.com/MYiR-Dev/Ocpp_Mongoose_demo.git -b myd-yf13x xmr@ubuntu:~/MicroOCPP$ cd Ocpp_Mongoose_demo xmr@ubuntu:~/MicroOCPP/Ocpp_Mongoose_demo$ tree -L 2 ├── CMakeLists.txt ├── external │ ├── ArduinoJson │ ├── MicroOcpp │ ├── MicroOcppMongoose │ └── mongoose ├── include │ └── hardware.h ├── libs └── src ├── hardware.c └── main.c
3、服务端与客户端通信建立
部署完成后,客户端成功与SteVe服务器建立WebSocket连接:
root@myd-yf13x:~/Microocpp# export LD_LIBRARY_PATH=/home/root/Microocpp/lib root@myd-yf13x:~/Microocpp# ./yf13x_ocpp_client & oot@myd-yf13x:~/Microocpp# Starting MicroOcpp on STM32MP135P... GPIO PC13 already exported. GPIO PI7 already exported. PC13 and PI7 simulate evse connecto [MO] info (MicroOcpp.cpp:379): initialized MicroOcpp v1.2.0 running OCPP 1.6.0 OCPP client initialized. Entering main loop... [MO] warning (MicroOcppMongooseClient.cpp:707): Insecure connection (WS) [MO] info (MicroOcppMongooseClient.cpp:711): connection ws://192.168.40.187:8180/steve/websocket/CentralSystemService/stm32mp1-charger1 -- connected! [MO] info (BootNotification.cpp:92): request has been Accepted [MO] info (StatusNotification.cpp:52): New status: Available (connectorId 0) [MO] info (StatusNotification.cpp:52): New status: Available (connectorId 1) [MO] info (StatusNotification.cpp:52): New status: Available (connectorId 2)
服务端管理界面将实时显示新上线的充电桩,证明底层链路与协议交互正常。

4、状态上报功能验证
通过操作GPIO电平变化模拟充电枪插拔过程,我们观察到客户端实时向服务器上报状态变更。
root@myd-yf13x:~/Microocpp# echo 0 > /sys/class/gpio/PI7/value root@myd-yf13x:~/Microocpp# [MO] info (StatusNotification.cpp:52): New status: Available (connectorId 2 root@myd-yf13x:~/Microocpp# echo 0 > /sys/class/gpio/PC13/value root@myd-yf13x:~/Microocpp# [MO] info (StatusNotification.cpp:52): New status: Available (connectorId 1)
服务器界面同步更新连接器状态,证明整个通信链路工作正常。
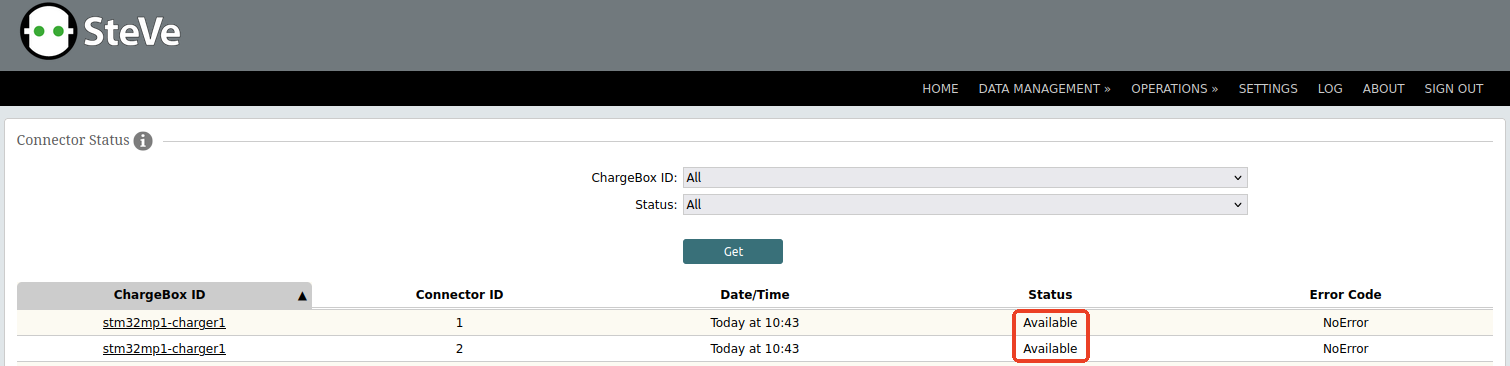
充电枪可用状态
结语
随着全球充电桩市场标准化程度不断提高,OCPP协议支持已成为产品竞争力的关键要素。米尔基于MYC-YF13X平台提供的OCPP完整解决方案,不仅大幅降低了开发门槛,更确保了产品的标准符合性和市场适应性。
立即联系米尔电子,获取完整技术资料与开发支持,加速您的充电桩产品进军全球市场!

纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
EdgeLock® 硬件级防护落地,米尔MYD‑LMX9X V2.0.0 引入安全系统
RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
RK3576 MIPI Camera ISP调试:主观调优与工程实战(下)
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
5.13深圳,米尔邀您参加安路科技AEC FPGA技术沙龙
2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔RK3506 DSMC实战,Local Bus高速互联
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板