

爆火的OpenClaw! 告别云端,米尔RK3576本地部署

2026-03-06

1212

来源:米尔电子
1. 概述
基于最近爆火的OpenClaw项目,本文将在MYD-LR3576开发板上部署OpenClaw ,并接入飞书机器人,实现本地自托管 AI 助手。
1.1. 硬件资源
部署端:
米尔基于RK3576 核心板开发板(MYD-LR3576)、外接鼠标、键盘和屏幕
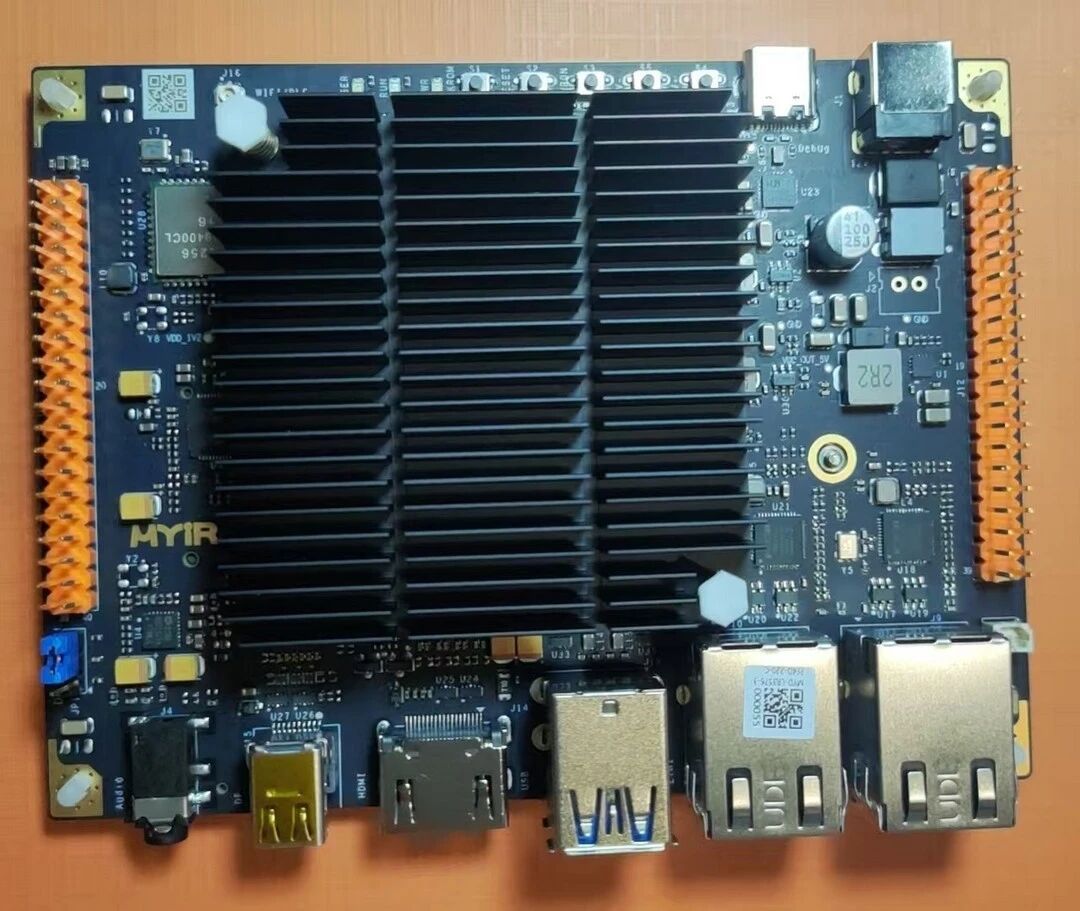
图:米尔基于RK3576 系列核心板开发板
调试端:
PC电脑(Windows系统、Ubuntu系统皆可)
1.2. 软件资源
MYD-LR3576开发板使用MYIR发布ubuntu22.04镜像。
如需烧录镜像请参考《MYD-LR3576J-GK Ubuntu 软件开发指南-V1.2》第5章节。
2. OpenClaw介绍
OpenClaw(前身为Clawdbot)是一款开源、本地优先的AI智能体,采用MIT许可证发布,由 Peter Steinberger(前 PSPDFKit 创始人)开发。
其核心定位是将大语言模型从“被动问答工具”转化为“主动执行任务的数字员工”,通过自然语言交互完成文件处理、系统操作、多工具协同等实际任务。
2.1. 主要功能
通过常用的聊天工具(Telegram、WhatsApp、飞书、钉钉、 等)直接对话
能实际执行操作:浏览网页、操作电脑、写文件、跑脚本、管理日程、发邮件、写代码、定时提醒
支持长期记忆(记住你的偏好、项目背景)
可扩展 Skills(技能插件),社区已有很多现成技能
本地优先、自托管、数据不上传云端(隐私保护)
支持几乎所有主流大模型(Claude、Gemini、OpenAI、Grok、Ollama 本地模型、阿里千问、GLM 等)
2.2. 项目特性
OpenClaw并非简单的对话应用,而是一个可自定义、可扩展的AI智能体平台,支持本地部署与云端部署双模运行,适配从嵌入式设备(树莓派、RK3576开发板)到高性能服务器的全类型计算设备。
3. OPENCLAW部署
配置openclaw安装环境并下载安装,初始化openclaw配置。
3.1. 安装openclaw
安装openclaw
root@rk3576:~# npm install -g openclaw@latest
npm warn deprecated inflight@1.0.6: This module is not supported, and leaks memory. Do not use it. Check out lru-cache if you want a good and tested way to coalesce async requests by a key value, which is much more comprehensive and powerful.
npm warn deprecated are-we-there-yet@2.0.0: This package is no longer supported.
npm warn deprecated gauge@3.0.2: This package is no longer supported.
npm warn deprecated rimraf@3.0.2: Rimraf versions prior to v4 are no longer supported
npm warn deprecated npmlog@5.0.1: This package is no longer supported.
npm warn deprecated glob@7.2.3: Old versions of glob are not supported, and contain widely publicized security vulnerabilities, which have been fixed in the current
3.2. 配置openclaw
1). 执行配置指令

图3-1. 配置启动界面
2). 启动模式
选择QuickStart模式

图3-2. 模式选择
3). 模型选择
这里选择提供免费tokens次数的Qwen,或者直接使用其他已有api-key的模型。

图3-3. 模型选择
4). 配置完成界面
图3-4. 配置完成界面
4. 接入飞书机器人
创建飞书机器人,在openclaw安装飞书插件并接入。
4.1. 创建飞书机器人
1). 登录飞书开放平台
打开飞书开放平台网址:https://open.feishu.cn,没有账户的需先创建账户,然后点击开发者后台。
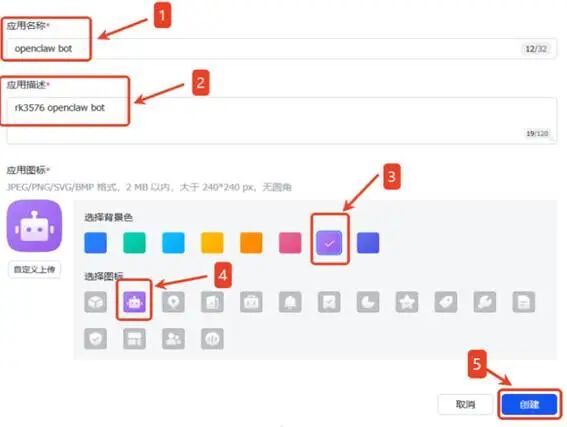
图4-1. 配置信息
2). 添加机器人能力

图4-2. 添加机器人能力
3). 配置应用权限

图4-3. 权限配置步骤
4). 导入JSON数据
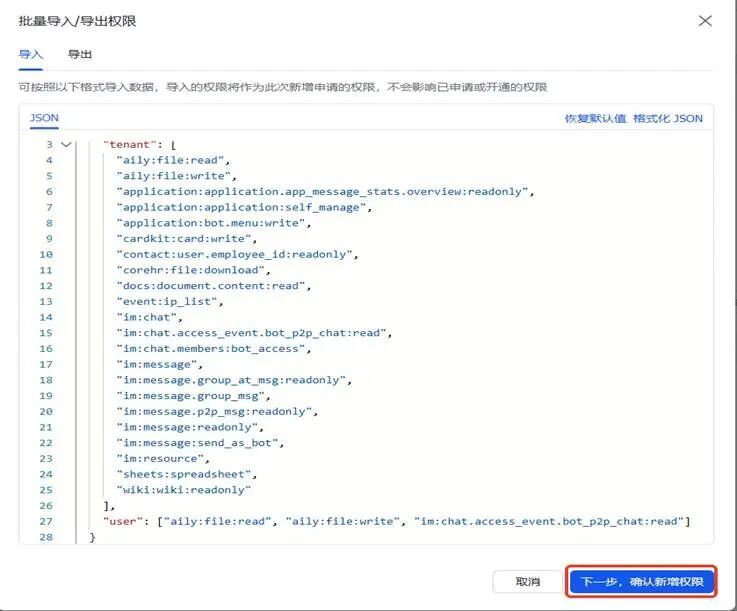
图4-4. 导入JSON
4.2. OpenClaw 接入飞书
1). 选择飞书通讯平台
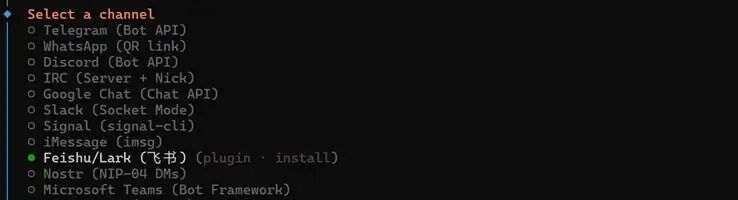
图4-5. 选择飞书

图4-6. 下载飞书
2). 飞书添加事件回调
在飞书开放平台,添加长连接订阅方式。

图4-7. 添加订阅方式

图4-8. 添加长连接
在同一界面中点击添加事件按钮,添加接收消息事件。

图4-9. 添加事件
5. 测试
5.1. 交互测试
输入消息交互:
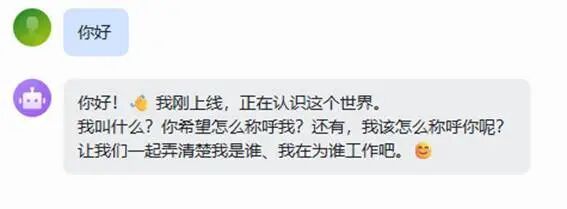
图5-1. 交互信息
使用飞书通过openclaw查看部署板信息。

图5-2. 交互信息
通过USB摄像头拍照并发送:
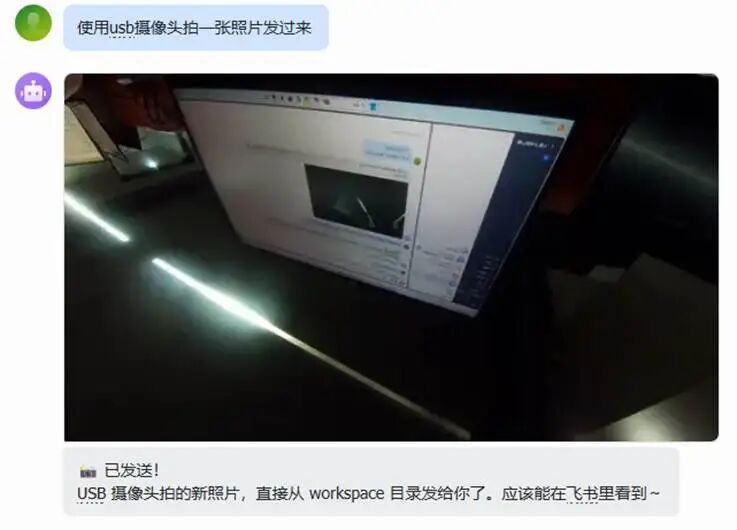
图5-3. 交互信息


纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
EdgeLock® 硬件级防护落地,米尔MYD‑LMX9X V2.0.0 引入安全系统
RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
RK3576 MIPI Camera ISP调试:主观调优与工程实战(下)
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
5.13深圳,米尔邀您参加安路科技AEC FPGA技术沙龙
2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔RK3506 DSMC实战,Local Bus高速互联
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板