

STM32也能轻松跑Linux了 !米尔STM32MP135核心板开发板体验

2023-06-29

4049

来源:米尔电子
上个月,意法半导体推出了新一代64位Cortex-A35内核,主频高达1.5GHz的STM32MP2x系列微处理器(MPU),这让STM32MP系列处理器又上了一个新的台阶。
最近,收到了一套米尔基于STM32MP135核心板及开发板,首次接触STM32MPx处理器,体验了一下,感觉还不错。
STM32MP135与普通STM32单片机在性能、价格、应用场景等各方面都有差异。同时,STM32MP135并非局限于裸机、RTOS,而是定位于更高的Linux操作系统平台。
下面就结合【米尔基于STM32MP135核心板及开发板】给大家讲解一下STM32MP135强悍的性能以及开发入门等相关的内容。
硬件平台介绍
STM32MP135的开发板有很多,这里就以米尔的【米尔基于STM32MP135核心板及开发板】为例来给大家讲述。
1、STM32MP135处理器
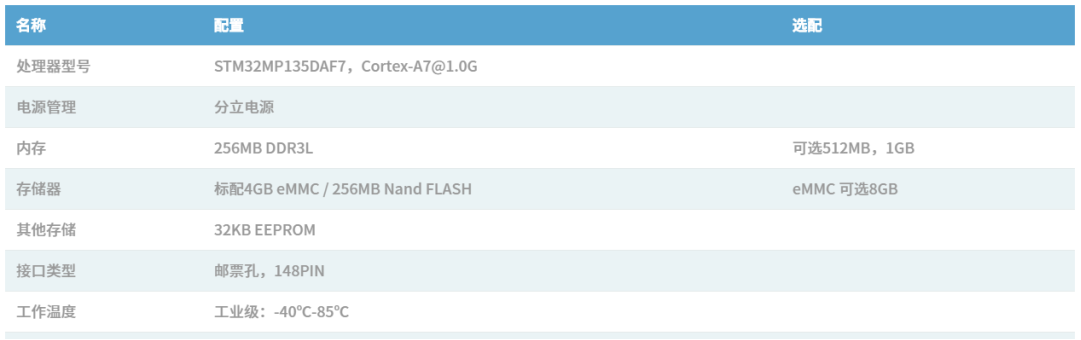
STM32MP135内核采用Cortex-A7,主频高达1.0GHz,属于入门级的MPU,拥有超高的性价比。

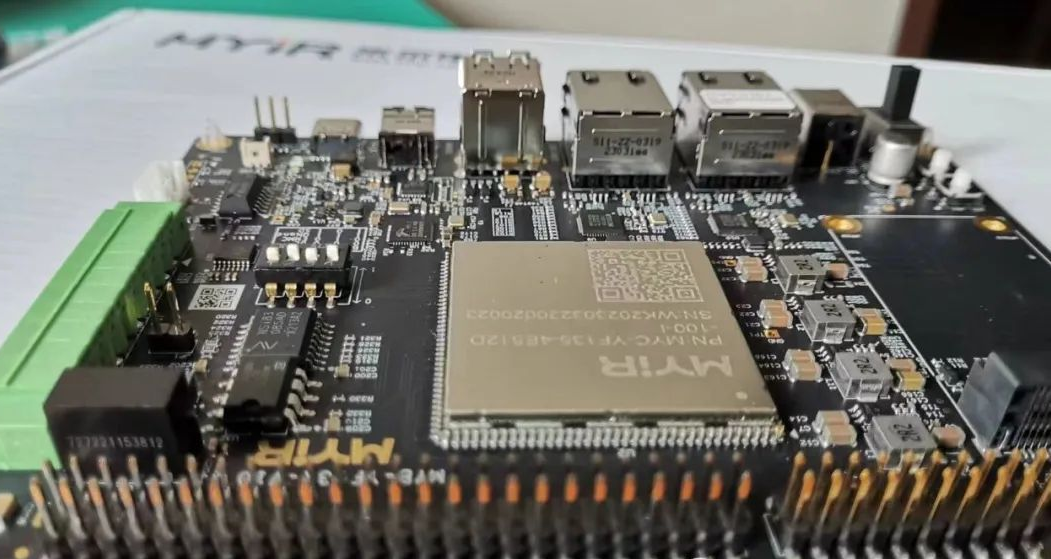
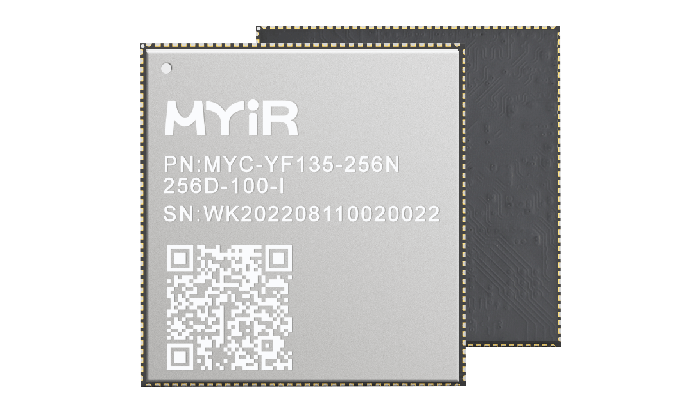
2、米尔基于STM32MP135核心板
米尔基于STM32MP135核心板主控位STM32MP135处理器,搭载DDR3L内存、标配4GB eMMC / 256MB Nand FLASH,以及32KB EEPROM,接口类型为邮票孔148PIN,尺寸37mm x 39mm。
应用方向:充电桩、电池管理、能源管理的方向。
米尔基于STM32MP135核心板介绍链接:
https://www.myir.cn/shows/110/57.html
3、米尔基于STM32MP135底板
米尔基于STM32MP135底板的外设资源以及接口就比较丰富和多样了。直接给出官方的信息:

轻松入门
早在2019年,ST就推出了STM32MP1系列MPU,其强大的性能吸引了不少人的关注。但由于当时配套的开发资料以及生态不够完善,入手学习也难住了一大批人。
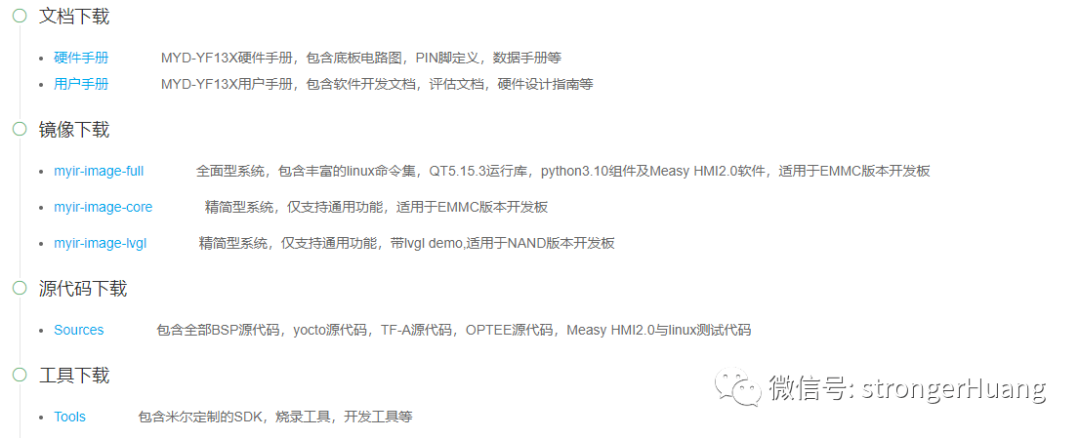
米尔设计这款米尔基于STM32MP135开发板时就考虑到了这个问题,在推出开发板的同时就推出了配套的开发资料。
在STM32MP135(MYD-YF13X)平台上跑Linux相比于普通STM32跑RTOS要复杂一点,需要具备一定的相关基础知识才行。
当然,米尔也针对新手提供了配套的手把手教程,能让你快速入门。
开发介绍
MYD-YF13X 搭载基于 Linux 5.15.67 版本内核的操作系统,提供了丰富的系统资源和其他软件资源。Linux 系统平台上有许多开源的系统构建框架,米尔核心板基于Yocto 构建和定制化开发。
1、开发环境
Linux开发主机:Debian, Ubuntu, RHEL等。
ST配套工具:STM32CubeProg、STM32CubeMX
安装米尔定制的 SDK
2、构建开发板镜像
第1步:获取源码
可以从米尔提供链接获取源码。http://down.myir-tech.com/MYD-YF13X/
也可以从github在线获取源码。
PC$ mkdir $HOME/githubPC$ cd $HOME/githubPC$ repo init -u
https://github.com/MYiR-Dev/myir-st-manifest.git --no-clone-bundle --depth=1 -m
myir-stm32mp1-kirkstone.xml -b develop-yf13xPC$ repo sync
第2步:快速编译镜像
这里我们需要使用米尔提供的 envsetup.sh 脚本进行环境变量的设置
PC$: DISTRO=openstlinux-weston MACHINE=myd-yf13x-emmc source
layers/meta-myir-st/scripts/envsetup.sh
然后,构建 myir-image-full 镜像。注意,选择构建不同的系统镜像,需使用不同的 bitbake 命令参数(具体命令参数可以参看提供的文档)。
第3步:构建 SDK
米尔已经提供较完整的 SDK 安装包,用户可直接使用。
3、烧录系统镜像
这里使用ST官方的STM32CubeProg 工具进行烧写,可以在Windows平台,也可以在Linux平台。提示:烧录的时间可能有点久,需要耐心等待一会儿。
当然,如果觉得慢,也可以用SD卡启动(烧写)。
4、修改板级支持包
这一节应该是相对比较重要的,也是相对比较难的,包括U-boot、 kernel等相关内容的编译与更新。
a.板载 TF-A 编译与更新
获取 TF-A 源代码:
PC$ cd /home/workPC$ tar -jxvf MYiR-STM32-tf-a.tar.bz2PC$ cd MYiR-STM32-tf-a
配置和编译源代码:加载 SDK 环境变量到当前 shell:
PC$ source
/opt/st/myir-yf13x/4.0.4-snapshot/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
进入源代码目录:
PC$ cd myir-st-arm-trusted-firmware
配置与编译源代码:
PC$ make -f $PWD/../Makefile.sdk all
以上是在独立的交叉编译环境下编译 TF-A,也可以在 Yocto 项目下编译 TF-A。
更新 TF-A:编译好之后,将 TF-A 镜像烧录进 Micro SD 卡,然后使用 dd 命令将镜像烧录到 SD 卡指定分区:
PC$: dd if=tf-a-myb-stm32mp135x-512m-sdcard.stm32 of=/dev/mmcblk0p1
conv=fdatasyncPC$: dd if=tf-a-myb-stm32mp135x-512m-sdcard.stm32 of=/dev/mmcblk0p2
conv=fdatasync
b.板载 u-boot 编译与更新
在独立的交叉编译环境下编译 u-boot,和上面编译 TF-A 类似,也是和常规的编译 u-boot 方法类似。
c.板载 Kernel 编译与更新
加载 SDK 环境变量:
PC$ source
/opt/st/myir-yf13x/4.0.4-snapshot/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
配置内核:
PC$ make ARCH=arm O="$PWD/../build" myir_stm32mp135x_defconfig
编译内核:
PC$ make ARCH=arm uImage vmlinux dtbs LOADADDR=0xC2000040
O="$PWD/../build"PC$ make ARCH=arm modules O="$PWD/../build"
这个配置可能相对比较复杂,编译时间也相对较长,具体可以参看官方手册。
5、适配硬件平台
这一节就是芯片底层相关的适配(驱动),包括创建设备树、利用STM32CubeMX 配置GPIO、外设时钟等,以及配置自己用到的管脚。
然后,就是添加自己的一些应用了。到此,基本达到入门这一步了。
最后
如果你想从STM32单片机裸机、RTOS进阶到Linux,这款STM32MP135【MYC-YF13X开发板】是一个不错的选择。同时,也会用到一些熟悉的生态工具。
这里给出米尔基于STM32MP135核心板介绍:
https://www.myir.cn/shows/110/57.html
米尔电子,专注嵌入式处理器模块设计和研发的高新技术企业,是领先的嵌入式处理器模组厂商。米尔电子在嵌入式处理器领域具有10多年的研发经验,为客户提供基于ARM架构、FPGA架构的CPU模组及充电控制系统等产品和服务;为智能医疗、智能交通、智能安防、物联网、边缘计算、工业网关、人工智能等行业客户,提供定制解决方案和OEM服务。公司通过专业高效的服务帮助客户加速产品上市进程,目前已为行业内10000家以上的企业客户服务。

纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
EdgeLock® 硬件级防护落地,米尔MYD‑LMX9X V2.0.0 引入安全系统
RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
RK3576 MIPI Camera ISP调试:主观调优与工程实战(下)
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
5.13深圳,米尔邀您参加安路科技AEC FPGA技术沙龙
2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔RK3506 DSMC实战,Local Bus高速互联
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板