

OpenCV行人检测应用方案--基于米尔全志T527开发板

2025-04-10

1497

来源:米尔电子
摘自优秀创作者-小火苗

一、软件环境安装
1.安装OpenCV
sudo apt-get install libopencv-dev python3-opencv
2.安装pip
sudo apt-get install python3-pip

二、行人检测概论
准备训练数据集:训练数据集应包含大量正样本(行人图像)和负样本(非行人图像)。
计算HOG特征:对于每个图像,计算HOG特征。HOG特征是一个一维向量,其中每个元素表示图像中特定位置和方向的梯度强度。
训练SVM分类器:使用HOG特征作为输入,训练SVM分类器。SVM分类器将学习区分行人和非行人。
评估模型:使用测试数据集评估训练后的模型。计算模型的准确率、召回率和F1分数等指标。
三、代码实现
import cv2
import time
def detect(image,scale):
imagex=image.copy() #函数内部做个副本,让每个函数运行在不同的图像上
hog = cv2.HOGDescriptor() #初始化方向梯度直方图描述子
#设置SVM为一个预先训练好的行人检测器
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
#调用函数detectMultiScale,检测行人对应的边框
time_start = time.time() #记录开始时间
#获取(行人对应的矩形框、对应的权重)
(rects, weights) = hog.detectMultiScale(imagex,scale=scale)
time_end = time.time() #记录结束时间
# 绘制每一个矩形框
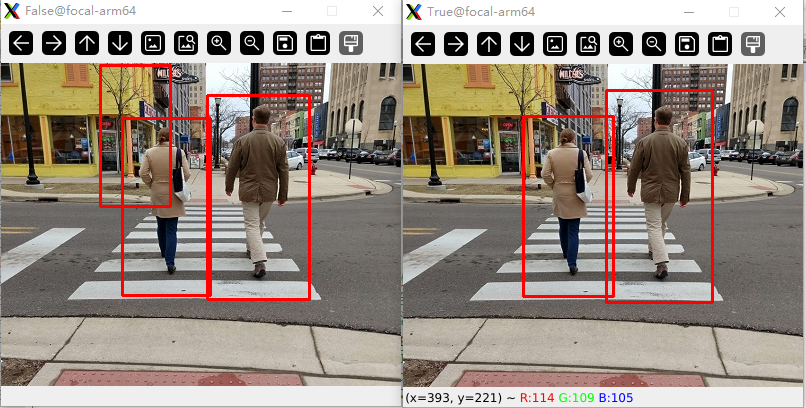
for (x, y, w, h) in rects:
cv2.rectangle(imagex, (x, y), (x + w, y + h), (0, 0, 255), 2)
print("sacle size:",scale,",time:",time_end-time_start)
name=str(scale)
cv2.imshow(name, imagex) #显示原始效果
image = cv2.imread("back.jpg")
detect(image,1.01)
detect(image,1.05)
detect(image,1.3)
cv2.waitKey(0)
cv2.destroyAllWindows()四、实际操作



更多资讯
纳秒级抖动×24小时零丢帧:RK3576工业级EtherCAT主站全拆解
EdgeLock® 硬件级防护落地,米尔MYD‑LMX9X V2.0.0 引入安全系统
RK3506工业网关:如何打通现场采集、无线传输与行业规约接入?
RK3576 MIPI Camera ISP调试:主观调优与工程实战(下)
RK3576 MIPI Camera ISP调试:客观标定与环境准备(上)
5.13深圳,米尔邀您参加安路科技AEC FPGA技术沙龙
2秒启动系统 · 资源受限下HMI最优解,米尔RK3506开发板× LVGL Demo演示
引入STM32MP135F安全芯!米尔MYD-YF13X系统、安全、功能三重升级
米尔RK3506 DSMC实战,Local Bus高速互联
OpenClaw秒级上线!JishuShell适配米尔RK3576开发板